

31. Загальний огляд роботи інтерфейсу spi.
Інтерфейс розробила компанія Motorola.
Slave – годинники, контролери.

Master генерує за допомогою текстового генератора текст. За цей час одночасно зсуваються регістри як з боку Master, так і з боку Slave.

…
останній етап

SPI працює в 3 режимах:
Run
Wait – тактовий генератор вимикається з боку Master, будь-яке передавання призупиняється, але після повернення в Run може бути відновлено і завершено
Stop – режим зменшеного енергоживлення. Призупиняється передача даних. Якщо SPI сконфігурований як Slave, він завершує передавання і отримання байтів.
MOSI – Master input, slave out

VCC - живлення
SCK – лінія синхроімпульсів
RESET –
CND – заземлення
Структурна схема spi

XTAL
S M
M S


MSB LSB
 Mosi(
PB2)
Mosi(
PB2)
SCK (PB1)
SS (PB0)
Логіка
тактування
Блок керування
Регістр
керування
SPI
Регістр стану SPI
Шина даних
Основні регістри spi
-0 – SPISR1 R/W
-1 – SPISR2 R/W
-2 – SPIBR – Регістр ботової швидкості R/W1
-3 – SPISR – Регістр стану R/W1
-4 – зарезервовано R2
-5 – Регістр даних R/W
-6 – зарезервовано
-7 – зарезервовано
34. Схеми з’єднання пристроїв з spi інтерфейсом
Схема з’єднання Master із Slave

Незалежне підключення пристроїв з SPI інтерфейсом
 Каскадне
з’єднання
Каскадне
з’єднання

35. Програмування spi
В микроконтроллерах AT89Sxxxx реализована возможность изменения содержимого памяти программ при нахождении МК в целевой системе – ISP – in-system programming. Эта возможность обеспечивается наличием последовательного интерфейса SPI. Этот интерфейс, кроме целей программирования, в некоторых моделях может также обеспечивать обмен данными между несколькими микроконтроллерами. Скорость обмена – до 1,5 Мбит/с.
Согласно стандарту интерфейса SPI, в нем присутствуют такие сигналы (в скобках указана соответствующая физическая линия порта МК):
MOSI (P1.5) – master output slave input – информационный выход контроллера, инициирующего обмен (ведущего) – вход ведомого контроллера;
MISO (P1.6) – master input slave output – информационный вход контроллера, инициирующего обмен (ведущего) – выход ведомого контроллера;
SCK (P1.7) – serial clock – линия синхронизации; тактовые импульсы формирует ведущий контроллер;
SS (P1.4) – slave select – линия выбора ведомого устройства; ведомое устройство должно формировать на этом выходе “0”.
Настройка интерфейса SPI для обмена данными с другими микроконтроллерами производится путем установки битов специальных РСФ:
SPCR – SPI control register, SPSR – SPI status register и SPDR – SPI data register. Битовая структура этих регистров в данной статье не рассматривается.
Для целей физического программирования Flash-памяти интерфейс SPI используется совместно с сигналом Reset, а линия SS не задействована. При подаче высокого уровня на вход Reset контроллер переходит в режим сброса, одновременно являющийся режимом записи памяти программ.
Физическое программирование Flash-памяти может быть выполнено непосредственно с ПЭВМ. Для выдачи сигналов программирования можно использовать LPT-порт, а необходимый протокол (последовательность команд, адресов и данных для записи) реализуется специальным программным обеспечением. Таким образом, через линии параллельного LPT-порта реализуется побитовая передача данных.
Программирование выполняется через кабель, построенный по схеме:
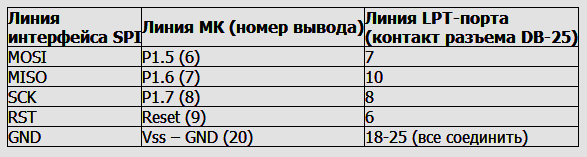
Кабель рекомендуется выполнять таким образом, чтобы каждый сигнальный провод образовывал витую пару с проводником GND (можно использовать плоский многожильный кабель с индивидуальной экранировкой проводов). Длина кабеля не должна превышать 1 м.
SPCR=0xD0; (0xC0 – для slave)
SPSR=0×00;
Отправить байт:
SPDR=data;
Принять байт:
data=SPDR;