

§ 92. Технология построения фотограмметрической сети
В общем случае построение фотограмметрической сети включает последовательное выполнение ряда этапов, в частности:
техническое проектирование фототриангуляции;
подготовительные работы;
измерение аэроснимков;
вычислительные операции, связанные с обработкой результатов измерений;
заключительные операции.
Техническое проектирование фототриангуляции выполняют одновременно с составлением технического проекта на производство работ, так как именно на этом этапе рассчитывается оптимальный масштаб аэрофотосъемки, подбирается фокусное расстояние аэрокамеры, планируются съемочные маршруты, подсчитывается число опознаков и т.д. Продолжением этих работ является проектирование привязки аэроснимков исходя из требуемой точности последующего фотограмметрического сгущения и параметров аэрофотосъемки. После выполнения полевых работ по определению координат и высот опорных точек готовят рабочий проект фототриангуляции, заключающийся в проектировании фототриангуляционных маршрутных или блочных построений исходя и?
248
плотности опорных точек, ограничений имеющегося программного обеспечения и т.п.
Подготовительные работы выполняются непосредственно перед фотограмметрич'еским сгущением. Они включают подбор необходимых материалов: снимков с опознанными опорными точками, каталогов их координат и высот, показаний бортовых приборов (стато-граммы, высотограммы, данных спутниковых измерений и др.), а также обоснование необходимости их использования.
Далее на аэронегативах намечают ряд точек, в частности:
опорные точки для внешнего ориентирования сети;
точки в шести стандартных зонах для взаимного ориентирования снимков;
связующие точки в тройном продольном перекрытии снимков для связи смежных звеньев маршрута и в поперечном перекрытии снимков для связи смежных маршрутов между собой;
точки для связи блоков фототриангуляции, контроля качества ортотрансформирования и др.;
характерные точки рельефа, урезы вод и др., отображаемые на топографической карте.
Все точки должны быть контурными, четкими, уверенно отождествляемыми на всех снимках, где они изображаются. Крайне желательно, чтобы они размещались на ровных площадках.
При выборе и размещении точек принимают во внимание, что выбираемые точки можно, по возможности, совмещать. Так, опорная точка, может размещаться в стандартной зоне, в тройном продольном и поперечном перекрытиях, и одновременно быть характерной. Как правило, число связующих точек должно быть не менее шести, а в каждой из шести стандартных зонах выбирают по 3-4 точки. С учетом этого общее число точек на снимке составляет 20 и более.
Выбранные точки маркируются на левом снимке стереопары, при се стереоскопическом рассматривании с оптимальным увеличением.
Измерения аэронегативов выполняют на стереокомпараторе, как правило, соединенном с устройством регистрации координат. Технология измерений зависит от используемой обрабатывающей программы, однако во всех случаях она предполагает ориентирование аэронегативов по координатным меткам и выполнение двух приемов измерений изображений меток (сетки крестов) и всех запроектированных точек сети с регистрации результатов на носителе.
Вычислительная обработка выполняется с помощью соответствующей программы в автоматическом или полуавтоматическом режиме с обязательным контролем качества выполнения тех или
249
иных этапов обработки. Содержание этапов и последовательность выполнения вычислений во многом определяется особенностями используемой программы и положенного в ее основу алгорита.
Внутреннее ориентирование выполняется с целью перехода от отсчетов по шкалам измерительного прибора к координатам в системе снимка оху. Эта операция предшествует любой аналитической обработке фотограмметрических измерений, так как все полученные ранее зависимости предполагают использование именно этой системы.
Такой переход осуществляется по результатам измерения координат изображений координатных меток и может быть выполнен, в зависимости от типа меток, на основе ортогональных, аффинных или проективных преобразований.
Ортогональные (конформные) преобразования применяются при наличии в плоскости прикладной рамки аэрокамеры четырех механических координатных меток, заданных расстояниями между ними в направлениях осей абсцисс и ординат.
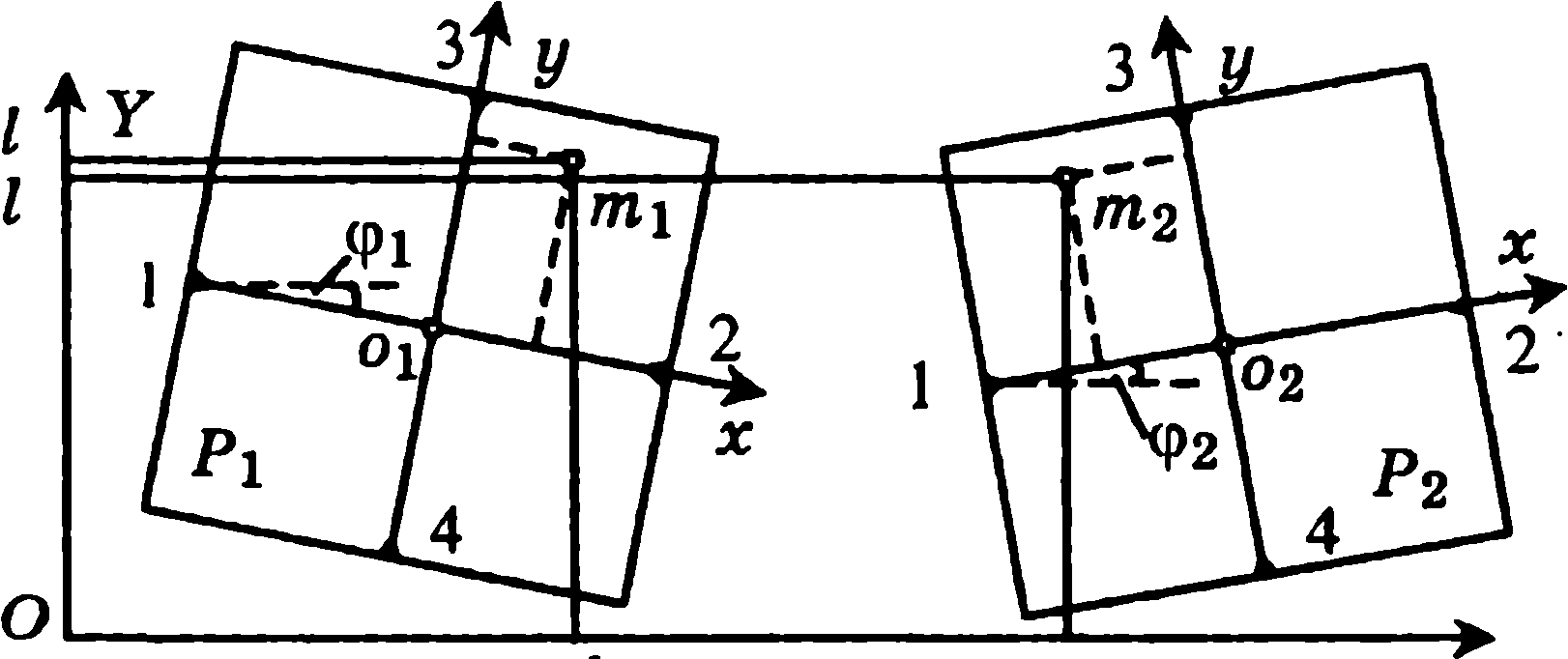
Обработка результатов измерений сводится к определению по формулам, вытекающим из рис. 13.12, угла поворота <р, фактических расстояний между координатными метками (1хх> Iyy) и масштабного коэффициента t = l°/l, где 1° - паспортные значения расстояний между координатными метками, и преобразованию по формулам
x = *0 + [*'cos(p-z/'sin(p]x*j (13 40)
У = у0 + \у'cosy + у'sinq>]xt\ '
Легко заметить, что такое преобразование сохраняет взаимное положение координатных осей, определяемых изображениями координатных меток аэрокамеры, поскольку и абсцисса и ордината поворачиваются на один и тот же угол ср.
Рис.
13.12. Внутреннее
ориентирование
снимков
250
сетки крестов. Математическая модель преобразования описывается зависимостями
х = а, + ахх' + а2у\ ((341)
Как видно, преобразование измеренных абсцисс и ординат точек выполняется по независимым параметрам, что позволяет учесть угол между координатными осями измерительной системы прибора и деформацию снимка вдоль каждой координатной оси.
Проективные преобразования применяются преимущественно при обработке материалов наземной фототопографической съемки, когда возможно несовпадение плоскости прикладной рамки с главной фокальной плоскостью. Для преобразования применяются формулы
х = Ахх' + А2у' + Аъ
Схх' + С2у' + 1
*/
=
Схх' + С2у' + 1
(13.42)
В формулах (13.40)- (13.42): х, у - координаты точек (координатных меток, крестов) во внутренней прямоугольной координатной системе аэроснимка оху\ х', у' - координаты тех же точек в системе измерительного прибора; t, cp, ait fy, Л/, Bt, Ct - параметры соответствующего преобразования.
Параметры преобразования находят по обычной схеме: определяют начальные значения неизвестных, приводят уравнения (13.40), (13.41) или (13.42) к линейному виду разложением в ряд Тейлора и составляют соответствующие уравнения поправок. Например, для случая аффинных преобразований они имеют вид
dxx5a{) + d3X5ax + d4X5a2 + lx = vx d2Ybb0 + rfsySb] + d6Y&b2 + lY =vY
(13.43)
где dtXf dw (i = 1,...6) - частные производные от функций (13.41) по соответствующим неизвестным; lx, ly ~ свободные члены уравнений, найденные как уклонения паспортных значений координат меток от вычисленных по формуле (13.41) с начальными значениями неизвестных.
Применение метода наименьших квадратов и условия [vvp] = min приводит к соответствующей системе нормальных уравнений, решение которой дает поправки к приближенным значениям неизвестных. После их введения по уточненным значениям определяемых величин выпол-
251
няют второе, третье приближение и т. д., пока величины свободных членов уравнений поправок окажутся меньше ошибок измерений.
Найденные параметры преобразования используют для перевычисления координат всех точек, измеренных в обрабатываемой стереопаре, в систему координат плоскости прикладной рамки по формулам (13.40) и (13.41), или (13.42).
По завершению внутреннего ориентирования программа контролирует и усредняет координаты связующих точек на среднем снимке смежных стереопар при условии неизменности их измеренных параллаксов. Усредненные координаты, если это предусмотрено обрабатывающей программой, исправляются поправками за влияние рефракции, деформации снимка и др.
Взаимное ориентирование выполняется строгим способом, по всем измеренным на стереопаре точкам. С этой целью выполняется несколько приближений, в каждом из которых составляются уравнения поправок вида (9.25) и нормальные уравнения (9.27) с учетом весов измеренных величин, решение которых дает поправки к неизвестным. Критерием сходимости итерационного процесса являются остаточные поперечные параллаксы точек (9.16), значения которых не должны превышать 10 мкм.
Построение модели заключается в определении фотограмметрических координат по формулам общего (9.3) или идеального (9.5) случаев съемки. В первом случае этому предшествует передача элементов внешнего ориентирования от левого снимка стереопары к правому по формулам (9.34) и (9.35).
При построении второй и последующих моделей маршрута выполняется приведение построенной модели к масштабу предыдущей. С этой целью по длинам проектирующих лучей до связующих точек текущей и предыдущей моделей вычисляются масштабные коэффициенты и выполняется масштабирование модели по формулам (13.6) и (13.7). Контролем качества измерений и вычислений служат расхождения плановых координат и высот связующих точек моделей, величины которых не должны превышать 10 и I0f/b мкм соответственно.
Построение маршрута и блока выполняется в рассмотренном ранее порядке (§§ 87, 88), в автоматическом режиме. В случае включения в обработку учета деформации маршрутной сети по полиномам уравнительные вычисления выполняются в следующем порядке:
определение элементов внешнего ориентирования маршрута;
пересчет координат опорных точек в систему координат маршрута;
учет деформации маршрута по полиномам избранного вида;
преобразование исправленных за деформацию фотограмметриче7 ских координат точек маршрута в систему местности.
252
По завершению обработки выполняется анализ качества объединения чаршрутных сетей по расхождениям координат контрольных, опорных и связующих точек. В частности; расхождения плановых координат связующих точек маршрутов, контрольных точек и опорных, использованных при внешнем ориентировании и учете деформации не должны превышать 0,5 мм, 0,3 мм и 0,2 мм соответственно. Расхождения высот перечисленных точек не должны превышать 0,2 - 0,5 от сечения рельефа.
Строгим уравниванием фототриангуляционной сети в фотограмметрической практике считается построение блока из отдельных моделей или уравнивание связок проектирующих лучей (§§ 88.2, 88.3). большинство применяемых для этой цели программ используют уравнивание с самокалибровкой, параметры которой устанавливаются в соответствии с рассмотренными выше принципами, а длина используемых полиномов может корректироваться пользователем. Действующая инструкция по фотограмметрическим работам в качества критерия качества таких построений устанавливает величину остаточной погрешности условия коллинеарности, величина которой не должна превышать 10 мкм для свободной сети и 20 мкм для сети, ориентированной по опорным точкам.
Заключительные операции включают так называемые сервисные задачи - такие, как составление каталогов координат и высот по блоку в целом, снимкам или съемочным трапециям, вычисление установок для фотограмметрических приборов, которые будут использованы в последующих работах: фототрансформаторов, стереопроекторов, стереографов и др. с учетом условий и особенностей их устройства, измерительных устройств, обработки и др.