

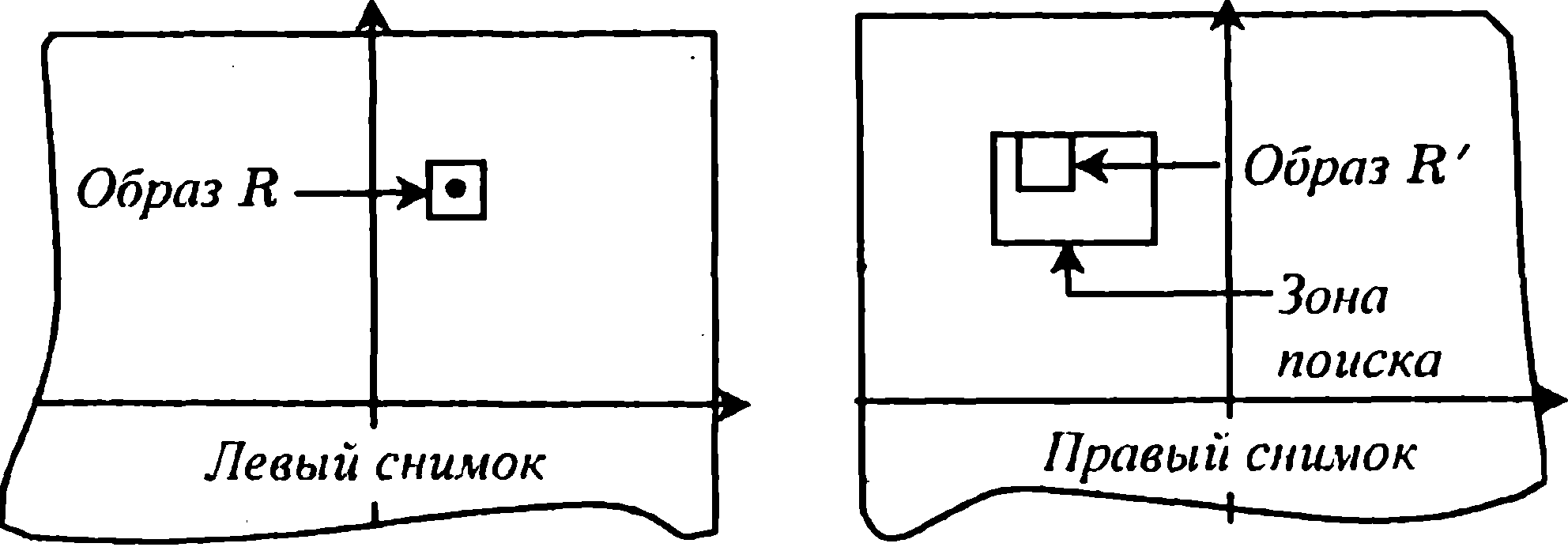
Рис. 14.13. К автоматической идентификации точек
Выбрать на левом снимке образ R в виде области размером пхп пикселов, в центре которой размещена опознаваемая точка (рис. 14.13), и определить его характеристику-эталон, на основе которой будет выполняться проверка условия (14.9).Определить на правом снимке зону поиска размером тхпг пикселов (т»п) вероятного расположения искомой точки с координатами центра хп & хл - Ьсю уп & ул (рис. 14.13).
Последовательным перемещением области размером пхп в границах зоны поиска на один пиксел вначале по оси х, а затем по
272
оси у создать на правом снимке серию образов R и определить характеристики каждого из них. 4. Сопоставить характеристики каждого образа R с характеристикой-эталоном вектора R. Искомая точка на правом снимке будет расположена в центре образа R , для которого выполняется условие (14.9). Установление степени соответствия векторов R и R представляет основную трудность и может быть выполнено различными путями, из которых наиболее распространенным является расчет коэффициентов корреляции между яркостями элементов образа R и каждого из образов R на правом снимке с использованием формулы:
-= Zfa-PoXPi-Pi) ^ (1410)
VKpi - Ро)2 х >Щр! - Ро)2
где ро и р'о - средние яркости элементов зон (фрагментов), соответствующих образам левого (Л) и правого (R) снимков.
Коэффициенты, подсчитанные для сочетаний образа R со всеми образами R\ образуют корреляционную матрицу: максимальное значение ее элемента соответствует наиболее тесной связи яркостей сравниваемых участков левого и правого снимков, и, следовательно, выполнению условия (14.9). Так что искомая точка лежит в центре образа i?' с максимальным коэффициентом корреляции.
Некоторые способы предполагают отыскание искомой точки по максимуму корреляционной функции, составленной на основе анализа элементов корреляционной матрицы с частными коэффициентами корреляции (14.10), соответствующей искомому образу R .
Размер области снимка, отождествляемой с образом R, обычно составляет 21x21 пиксел; при малом числе контуров местности он увеличивается до 41x41 пикселов. Программы обработки обычно запрашивают полуразмер корреляционной матрицы (образа R).
Размер области поиска на правом снимке выбирается таким, чтобы ом был больше ожидаемого смещения точки из-за влияния рельефа местности, подсчитываемого по формуле (3.40). Так, при Н = 2000 м, h. = 50 м г = 100 мм будем иметь 8д = 2,5 мм, а размер области поиска - минимум 5x5 мм.
Рассмотренный алгоритм позволяет отождествить точку на правом снимке с точностью, не превышающей одного пиксела. Для точных фотограмметрических измерений этого недостаточно, и для ее увели-
273
чения выполняют второй прием поиска с уменьшенным в k раз размером пиксела и соответственно меньшей областью поиска.
Используемые в настоящее время способы автоматического отождествления точек аэроснимков основаны на более или менее строгом анализе яркостей и геометрического положения элементов изображения, и их надежность всецело определяется метрическими и изобразительными свойствами изображений, особенностями контурной нагрузки и т.п. Все это предопределяют целесообразность стереоскоп пического контроля положения измерительной марки после работы коррелятора, особенно при обработке снимков малоконтурной местности. В большинстве случаев опытный наблюдатель ее обязательно чуть-чуть подправит по высоте.
Кроме того, смещения точек, вызванные влиянием угла наклона снимка и рельефа местности, вызывают смещения отдельных элементов растра, что меняют рисунок изображения и это не может не сказываться на качестве идентификации.
Так, если на левом снимке образ R всегда представлен квадратом, то на правом снимке из-за влияния угла наклона и рельефа местности соответствующие элементы образа R получают смещения, и в общем случае образуют контур многоугольника. Поскольку анализируемый образ R геометрически не всегда подобен образу Д, то вероятность полного совпадения искомой точки уменьшается. Еще более сложная ситуация возникает в случае, если изображения левого и правого снимков развернуты одно относительно другого. Правда, из-за малости элементов изображения влияние перечисленных источников искажений не столь значительны, а их влияние можно компенсировать геометрической коррекцией положения пика корреляции и соответствующей ему точки правого снимка. Одно из таких решений основано на том, что смещения элементов образа являются следствием влияния рельефа в пределах соответствующего участка местности и интерпретируются как параллактические смещения .
В системах цифровой обработки изображений достаточно широко применяется еще один способ для идентификации точек снимков, сущность которого заключается в следующем.
Поскольку перекрывающиеся части смежных снимков являются проекциями одного и того же участка местности, полученными из разных центров, то перекрывающиеся изображения пары смежных снимков проективны, и для преобразования их координат правомерно применение формул проективного преобразования (4.1):
Книжников Ю. Ф., Гельман Р. Н. О некоторых источниках погрешностей при автоматическом измерении цифровых стереопар // Геодезия и картофафия. 2000. № 5. с. 25-31.
274
А,*' |
+ A2y' |
+ AA |
Ctx Btx' |
' + C,y + B2y' |
+ 1 + bA |
Cxx |
' + C,y |
+ 1 J |
где х', у',х, у - координаты точек, отнесенные к плоскостям левого и правого снимков соответственно; At, Bit Ct - параметры проективного преобразования.
Зависимости (14.11) содержат восемь неизвестных параметров преобразования, для определения которых достаточно измерить на смежных снимках координаты четырех пар соответственных точек, составить восемь уравнений поправок, решение которых позволяет отыскать параметры А/, В*, Cif после чего они могут быть использованы для идентификации любых других точек обрабатываемых снимков. Возможности рассмотренного способа ограничиваются влиянием рельефа местности.
Отождествление соответственных точек аэроснимков является базовым процессом технологии как машинного зрения, так и цифровой фотограмметрии, и ее совершенствованию уделяется большое внимание. Сегодня имеется целый ряд способов решения этой задачи, основанных на использовании уравнений базисных (эпиполярных) линий, метода пирамид (HRC), метода вертикальной линии (ULL), метода динамического программирования и др.; активно разрабатывается метод структурной (реляционной) корреляции, устанавливающей соответствия между элементами сопоставляемых структурных описаний. Практическое применение этих методов позволит в перспективе полиостью автоматизировать процесс отождествления точек снимков.
Заметим, что если точность монокулярного измерения координат точек цифровых снимков ограничивается их геометрическим разрешением, то точность их идентификации и измерения координат на смежном снимке всегда может быть выполнена с субпиксельной (подпик-ссльной) точностью, что и объясняет высокую точность фотограмметрических обработки цифровых изображений.