

11. Характеристики звеньев второго порядка и чистого запаздывания
Объекты 2-го порядка. В таких объектах вещество или тепло заключено в двух объемах, разделенных сопротивлением. Примерами этих объектов являются теплообменник, в котором тепло передается через стенку от одной жидкости к другой; два сообщающихся между собой сосуда с жидкостью и т. д.
Типовое звено второго порядка


передаточная

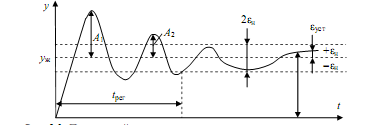
Если Т1≤Т2 – процесс колебательного характера.
 0<?<1
0<?<1
Звено запаздывания Запаздывание выражается в том, что его выходная величина начинает изменяться не сразу после нанесения возмущения, а только через некоторый промежуток времени τ, называемый временем запаздывания. Все реальные объекты обладают запаздыванием, так как изменение потоков вещества или тепла распространяется в объектах с конечной скоростью и требуется время для прохождения сигнала от места нанесения возмущения до места, где фиксируется изменение выходной величины. Обозначив это расстояние через l, а скорость прохождения сигнала через v, выразим время запаздывания: τ = l / v. Примером объекта, обладающего чистым запаздыванием, является ленточный питатель сыпучего материала.Звено запаздывания характеризуется ур-ем вида у(t)=X*(t-),W(p)=e-p
Т.е. выходная величина воспроизводит входную с запаздыванием по времени равным .

Системы любой сложности могут быть представлены как совокупность элементарных динамических звеньев соед. Последовательно, параллельноили с обратной связью.
23. Классификация измерений
Измерение перемещений, размеров.
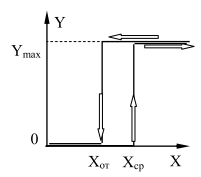
В кач. измерительных преобразователей перемещений и размеров используют устройства, характеристики которых изменяются при изменении их линейных размеров или относительного положения элементов. В зависимости от вида статической характеристики различают дискретные и непрерывные преобразователи.Дискретные преобразователи имеют релейную статическую характеристику.При достижении измеряемой величиной значения Хср вых.величина скачкообразно изменяется от 0 до максимального значения Ymax. При дальнейшем увеличении входной величины (перемещения) выходная величина не изменяется. При уменьшении входной величины выходная уменьшается до 0 при другом значении Хот, которое всегда меньше Хср. Дискретные преобразователи характеризуются коэффициентом возврата К=Хот /Хср <1.Они могут быть контактными и бесконтактными.
Контактные это механический выключатель, замыкающий или размыкающий электрическую цепь. Достоинства:простота конструкции и низкая стоимость,питание от постоянного и переменного тока.Недостатки:невысокая надежность,искрение при срабатывании,наличие непосредственного контакта с объектом, невысокая точность и значительный гистерезис.Исп. как сигнализаторы максим. перемещений, концевые выключатели.
Бесконтактные – оптические, емкостные, индуктивные.(+)а:нет контакта с объектом, малые габариты, высокие надежность и точность, К≈1.(-):сложность конструкции и более высокая стоимость, малые коммутируемые токи.
Непрерывные преобразователи. В них выходная величина изменяется непрерывно при изменении входной величины. Статическая хар-ика м.б. линейной или нелинейной. По принципу действия различают резистивные, емкостные, индукционные.Пр-п действия резистивных преобразователей основан на зависимости электрического сопротивления ЧЭ от положения подвижного элемента (контакта). ЧЭ представляет собой каркас, на который намотана проволока. В электрическую цепь ЧЭ чаще всего включаются как делитель напряжения.
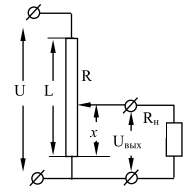
Статическая характеристика преобразователя имеет вид:
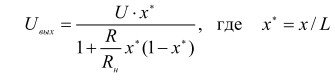

Степень нелинейности статической характеристики определяется соотношением сопротивлений датчика и нагрузки. Дляобеспечения линейности уменьшают сопротивление датчика (но это приводит к увеличению его потребляемой мощности) или используют каркас специального профиля. Достоинства:простота конструкции и низкая стоимость, некритичность к выбору питающего напряжения и мощный выходной сигнал,возможность получения статической характеристики любого вида путем изменения профиля каркаса.Недостатки: наличие подвижного контакта, что приводит к искрению, а также изменению характеристики вследствие истирания. наличие дополнительного переходного сопротивления.
Индуктивные преобразователи. Пр-п дейст. осн. на зависимости индуктивностиЧЭ от геометрич. хар-ик (воздушного зазора, расстояния между витками) или свойств магнитопровода.
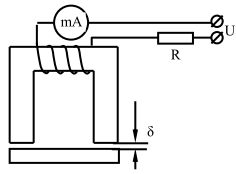
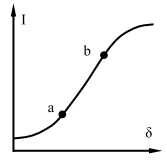
При подкл. датчика к источнику перемен. тока в цепи протекает ток. Магнитное сопротивл. будет резко возрастать с увеличением зазора δ, индуктивность – уменьшаться, а ток в цепи – увеличиваться.Статическая хар-ка нелинейна и используется участок, кот. можно считать линейным.Чувствительность датчика зависит от частоты питающего напряжения. Исп.я для контроля толщины немагнитных покрытий.
Емкостные преобразователи.Пр-п дейст. осн. на измен. электрич. емкости конденсатора при изменении положения его обкладок.
![]()
В качестве входных переменных используются расстояние между пластинами d и площадь перекрытия S. Статическая характеристика зависит от изменяемого параметра.(+) – малые габариты и высокое быстродействие. (-) сложность конструкции.
Измерение скорости вращения.единица измерений= частота вращения, т.е. количество полных оборотов в секунду (минуту): f=n/t. Угловая скорость и частота вращения связаны соотношениемω =2·π·f. средства изменения частоты вращения устройств или их частей применяются тахометры.По пр-пу действия делят на: механические, электрические,оптические.
Механические тахометры подразделяются на центробежные и на вихревых токах.
В центробежных вращающийся маятник отклоняется под действием центробежной силы и через рычажную передачу приводит в движение стрелочный механизм. Преимущества. Простота конструкции и невысокая цена, удобство использования, возможность непрерывного контроля, широкий диапазон измерений (до 10 000 об/мин). Показания не зависят от направления вращения.Недостатки. Измеряют частоту не от 0, а от некоторого значения. Диапазон измерений - 1:3 – 1:10. Влияют на объект измерений из-за контакта с ним. Погрешность более 1%.
Тахометр на вихревых токах имеет вращающийся постоянный магнит, поле кот. возбуждает вихревые токи в алюмин. диске. При этом возникает вращающий момент, пропорци. частоте вращения. Под действием момента перемещается стрелка до тех пор, пока не уравновесится противодействующим моментом, который создается пружиной.(+) измеряют частоту вращения от нуля.(-)максимальная измеряемая частота до 5 000 от/мин, погрешность – до 3%.
Электрические аналоговые. Это микромашины постоянного или переменного тока. Вых. сигнал – электрический. В одних частоте вращения ротора пропорциональна амплитуда, в других – частота выходного сигнала. (-) контакт с объектом измерений. Погрешность более 1%.
Электрические дискретные. Чаще исп. тахометры с индуктивным съемом сигнала. На вращ. валу устанавливается постоянный магнит, который при перемещении вблизи катушки, наводит в ней э.д.с.(+)отсутствие контакта с объектом.(–)амплитуда сигнала зависит от частоты вращения.
Оптические. Наиболее распростр. стробоскопы, пр-п дейст.кот.осн.на сравнении частоты вращения с известной частотой вспышек источника света. Преимущества – отсутствие контакта с объектом, широкий диапазон измерений и малая погрешность. Недостаток – возможность ошибки при кратных частотах.
3. Измерение массы.Взвешивание основано на использовании силы гравитации. При этом сила создаваемая измеряемой массой, сравнивается с известной силой, которая может создаваться разными способами:грузом известной массы,растяжением пружины деформацией жестких элементов (тензодатчиков),пневматическим или гидравлическим устройством (давлением сжатого воздуха или жидкости),электрическим устройством (соленоид в магнитном поле),при погружении тела в жидкость (сила Архимеда).Погрешность взвешивания во многом зависит от метода сравнения.
Рычажные весы. Неизвестная масса определяется уравниванием крутящих моментов, развиваемых взвешиваемой массой и гирей, приложенных к противоположным плечам рычага. Имеют высокую точность и используются как в промышленности, так и в научных исследованиях. Погрешность может быть менее 0,01%.
Пружинные весы. Масса определяется по деформации пружины. Преимущество – простота конструкции, малые габариты.Уменьшить погрешность можно используя при измерениях метод замещения.
Измерительные преобразователи. Во многих случаях результат взвешивания используется в системах автоматического контроля и управления, поэтому он должен быть преобразован в удобную для передачи и преобразования форму, как правило, электрический, пневматический или гидравлический сигнал.
Виброчастотный (струнный). Действие основано на изменении частоты струны, установленной на упругом элементе, в зависимости от величины приложенной к нему силы. Недостатками являются влияние на показания влажности, температуры, вибрации, а также сложность изготовления. Однако оборудованные ими весы стоят очень дешево.
Тензометрический.Распростр. благодаря простоте конструкции, малым габаритам и высокой точности. Действие основано на преобразовании деформации упругих элементов в изменение электрического сопротивления. В качестве упругого элемента выступают металлические изделия специальной конструкции – пластины, столбики, кольца и др. Преобразователем служит высокочувствительная спираль из специального сплава, которая особым способом приклеивается к упругому элементу. Измеряемое усилие с помощью упругого элемента преобразуется в деформацию проволоки и, следовательно, в изменение сопротивления.
Современные промышленные весы представляют собой электронные устройства, у которых весоприемное устройство (платформа), опирается на 1 или несколько датчиков. Далее сигнал преобразуется в показания и вводится
коррекция.