

1.Предмет и задачи дисциплины «Автоматика, автоматизация и асутп»
Автоматика – раздел технической кибернетики изучающей вопросы управления, а также создания оптимального использования технических средств управления и регулирования
Управление – процесс воз-действия на объект с целью изменения его состояния для достижения поставленной це-ли, осуществляется регулято-ром
Технический объект – ма-шина, прибор, система
Виды автоматизации:1)Частичная – когда автоматизируется отдельные виды операции, взаимно между собой не связанные.2)Комическая – когда автоматизируются отдельные операции, связанные между собой механическими процессами.3)Полная – когда автоматизируются основные, вспомогательные операции, а также процессы управления.
Автоматизация включает в себя:Защиту,Сигнализацию,Блокировку,Авторегулирование,Авто контроль,Управление.Защита - отключение цепей или аппаратов при не рабочих режимах.Сигнализация – для передачи сигнала о состоянии объекта.Блокировка – взаимосвязь отдельных аппаратов во время их работы.
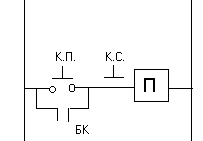 При
нажатии
К.П.
При
нажатии
К.П.
Автоматика-это отрасль науки и техники охватывающая территории и принципы построения системы технологическими процессами действий без непосредственного участия человека.
4. Классификация и структурные схемы САУ
Автоматические системы управления делятся по назначению на:
1. Автоматические системы контроля технологических параметров (АСК)
2. Автоматические системы сигнализации (АСС)
3. Автоматические системы регулирования (АСР или САР)
4. Автоматические системы управления технологическими процессами (асутп)
5. Автоматические системы управления роботизированными комплексами (асурк)
6. Автоматические системы управления предприятием
Различают два основные типа САУ – разомкнутый и замкнутый.
В разомкнутых САУ выходная величина ОУ y не измеряется. Существуют разомкнутые САУ, которые управляют только по заданному воздействию z (рис. 5.1, а) или только по возмущению v (рис. 5.1, б).
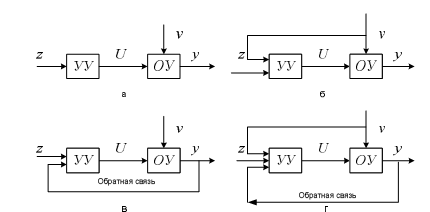
Рис. 5.1. Структурные схемы САУ
Если принять, что на объект управления действуют разные возмущения и только часть из них подчиняется управляющему воздействию УУ, тогда для более точного управления используют замкнутые системы (рис. 5.1, в, г). В них на вход УУ подают заданное воздействие z и выходную величину ОУ y. УУ сравнивает заданное значение z с фактическим y, и в зависимости от величины отклонения формируется сигнал коррекции U. На величину отклонения влияет возмущение v. Если возмущение v непрерывно меняется, то существует большее или меньшее отклонение у от z, и вырабатывается непрерывно коррекция U (рис. 5.1, в).
САР в зависимости от цели управления и характера изменения заданного воздействия делятся на стабилизирующие, программные и следящие.
Стабилизирующие САР поддерживают технологические переменные на постоянных значениях с заданной точностью. Если технологический процесс требует смен значений переменных по программе, согласно с технологическим регламентом, то используют САР, которые называют программными. Задачи слежения за изменениями переменных и отображения значений выполняют следящие системы.