

57. Лётная и техническая эксплуатация аэрометрических приборов и систем.
В процессе эксплуатации необходимо следить за чистотой отверстий, камер в магистралей ПВД. При наличии грязи, пыли, льда или снега, а такие других посторонних предметов в камерах и магистралях ПВД систему необходимо продуть сжатым воздухом давлением не более 4 кгс/см2. Приборы, подсоединенные к соответствующим магистралям ПВД, необходимо отсоединить во избежание вывода их из строя. Не допускается также наличие вмятин, царапин и забоин на зеркальной поверхности приемника.
58. Гироскоп, его основные свойства и уравнения движения. Гироскопический момент. Правило прецессии.
Гироскопом называется тело (ротор), вращающееся вокруг своей оси и обладающее большим кинетическим моментом.
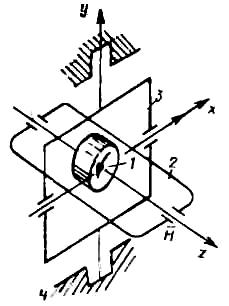
Рис. 1. Схема гироскопа с тремя степенями свободы
При вращении ротора гироскопа вокруг своей оси развиваемые им силы (моменты) обеспечивают (при отсутствии воздействия внешних сил) сохранение положения этой оси неизменным относительно мирового пространства.
Гироскоп обладает следующими свойствами:
Ось ротора гироскопа не изменяет своего положения в пространстве при вращении карданного подвеса относительно осей х, у, z (здесь имеется в виду, что трение в осях подвеса незначительно).
2. Момент, приложенный к внешней раме гироскопа, вызывает вращение оси ротора относительно оси внутренней рамы и наоборот, момент, приложенный к внутренней рамке, вызывает вращение оси гироскопа относительно оси внешней рамки.
При изменении направления приложенного внешнего момента на обратное измененяется и направление вращения рам.
Движение оси вращения ротора гироскопа вокруг осей его рам под действием внешнего момента называется прецессией гироскопа
Она всегда сопровождается периодическим движением, называемым нутацией. Нутация - колебательные движения оси прецессирующего тела.
3.Угловая скорость прецессии гироскопа тем больше, чем больше внешний момент.
4. Угловая скорость прецессии возникает и устанавливается практически мгновенно (скачком) при приложении момента и также исчезает при снятии его. При изменении величины момента меняется и величина угловой скорости прецессии, происходит это практически мгновенно.
5. Прецессия оси ротора гироскопа происходит в направлении, при котором вектор угловой скорости вращения ротора стремится совпасть с вектором внешнего момента по кратчайшему расстоянию (Рис. 2)
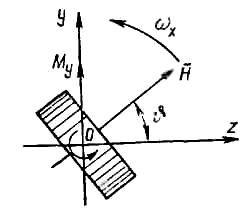
Например, на рис. 2 вектор момента внешних сил Му направлен по оси у внешней рамы. Согласно свойству (2) гироскопа его ось z будет прецессировать вокруг оси внутренней рамы х с угловой скоростью x. При этом вектор кинетического момента гироскопа Н стремится совпасть с вектором М по кратчайшему пути.
H = ΩI — кинетический момент ротора гироскопа;
где, Ω и I — угловая скорость собственного вращения и момент инерции гироскопа.
Для определения направления прецессии пользуются, например, правилом полюсов.
Полюсом гироскопа является тот конец его главной оси, со стороны которого вращение наблюдается происходящим против часовой стрелки.
Полюсом силы называется тот конец оси гироскопа, со стороны которого действие приложенной к нему внешней силы кажется происходящим против часовой стрелки.
Правило полюсов формулируется следующим образом: при приложении к гироскопу момента внешней силы полюс гироскопа кратчайшим путём стремится к полюсу силы.