

15. Типы, конструкция и работа авиационных топливомеров.
Поплавковые топливомеры. В качестве примера поплавкового топливомера рассмотрим электромеханический бензомер типа СБЭС (суммирующий бензиномер электрический с сигнализацией остатка топлива). В комплект прибора входят: датчики, размещённые в баках, указатель, переключатель, система сигнализации и линия связи.
Датчик ( рис. а ) преобразует перемещение поплавка 3 в зависимости от уровня топлива с помощью передаточного механизма в перемещение щётки потенциометра 9. Сильфон 4 обеспечивает герметизацию внутреннего пространства бака и подвижность передаточного механизма. Потенциометр датчика ( рис. б ) включён в измерительную схему, подобную схему, подобную схеме манометра типа ЭДМУ. В бензиномере типа СБЭС применён логометрический указатель с подвижными рамками и неподвижным магнитом. Бензиномер имеет один указатель на две группы баков. С помощью переключателя его можно подключить к левой или правой группе баков, а также ко всем бакам, замеряя суммарное количество топлива.
При критическом остатке топлива замыкается контакт 11 и в цепи сигнализации включается лампа. Для создания указателя с равномерной шкалой каркас потенциометра профилируют с учётом функциональной зависимости объёма топлива в баке от его уровня.
Методические ошибки поплавковых топливомеров определяются ускорениями, действующими на поплавок при эволюциях ЛА, стояночными углами ЛА и прогибом крыльев, в которых находятся баки с топливом, под действием аэродинамических сил. Основная инструментальная погрешность топливомеров является следствием изменения параметров электрической схемы от температуры окружающей среды. Суммарная приведённая погрешность поплавковых топливомеров достигает ± 5% в рабочем диапазоне шкалы. При эксплуатации поплавковых топливомеров возможны следующие дефекты: нарушение герметичности датчика, нарушение контакта между щёткой и потенциометром, отказ системы сигнализации из-за разрегулировки или загрязнения контактов, деформация рычагов и потеря плавучести поплавка из-за его разгерметизации. Вследствие этого на ЛА широко применяются ёмкостные топливомеры, которым не свойственны перечисленные дефекты.
Ёмкостные топливомеры. На современных летательных аппаратах эти топливомеры нашли наибольшее применение.
Датчиком топливомера типа СПУТ (система программного управления и измерения топлива) является размещённый в баке цилиндрический конденсатор, обкладками которого служит набор коаксиально расположенных труб. Вследствие разных диэлектрических постоянных топлива и газовой среды в свободной от топлива части бака ёмкость конденсатора
Сх = К1 + К2h,
где К1, К2 – постоянные коэффициенты, зависящие от параметров конструкции датчика и диэлектрических постоянных топлива и газовой среды;
h – высоты уровня топлива в баке.
Но из-за изменения площади поперечного сечения бака S в зависимости от h прямой пропорциональности между массой топлива m и уровнем h не существует. Чтобы получить необходимую зависимость Сх = f(m) и, как следствие, равномерную шкалу указателя, проградуированную в массовых единицах, профилируют обкладки датчиков в соответствии с изменением S.

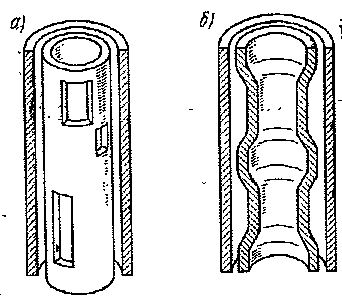
Рис.2 Схема емкостного топливомера
Принцип действия измерительной части топливомера основан на измерении ёмкости с помощью схемы самобалансирующего моста 1. Он состоит из датчиков Сх и С1, постоянной ёмкости С2, резисторов R1 и R2, необходимых для регулировки при нулевом количестве топлива, и резисторов R3, R4, R5 и R6. Конденсатор С1 предназначен для исключения протекания постоянного тока через датчик в случае короткого замыкания в усилителе А. Так как С1 >> Сх, то ёмкость датчиков определяется значением Сх. При сухих баках, изменяя сопротивление R1, добиваются установки стрелки указателя на нулевой отметке шкалы. Начальное значение ёмкости датчика или ёмкость сухого датчика Сх = С2 , щётка R6 занимает крайнее верхнее положение, а R3=R1 + R2 .
Если баки заполнены топливом, то с помощью сопротивления R5 стрелку указателя устанавливают на отметке шкалы, соответствующей количеству топлива. При его выработке и изменении Сх напряжение Ucd с измерительной диагонали cd подаётся на усилитель А и двигатель М. Последний через редуктор, изменяя сопротивление R6, уравновешивает мост 1 и перемещает стрелку на угол α, который пропорционален Сх. Показание стрелки по шкале указателя определяет количество оставшегося топлива в баке. Питание схема осуществляется напряжением 115 В 400 Гц.
В современных топливомерах, которые градуируются в массовых единицах, имеются устройства температурной компенсации. Они устраняют методическую погрешность, которая возникает в топливомере из-за изменения плотности диэлектрической постоянной при изменении температуры топлива. Такое устройство представляет собой мост 2, плечами которого являются: компенсационный ёмкостный датчик Сk , цепочка C3R7 и вторичные обмотки w2 и w3 трансформатора Тр2. Датчик Ck , состоящий из нескольких прямоугольных пластин, заключённых в трубчатый корпус, помещается в нижнюю часть бака, из которого топливо вырабатывается в последнюю очередь. Следовательно, он всегда погружен в топливо и его ёмкость может изменятся только вследствие изменения диэлектрической постоянной εТ . Мост 2 уравновешен при температуре + 200 С, для которой произведена тарировка схемы. Если при постоянном количестве топлива в баках температура его измениться, то на измерительной диагонали моста 1 появиться напряжение Ucd . На измерительной диагонали моста 2 возникает напряжение Uef = Ued , но противоположное по фазе. На входе усилителя А они компенсируют друг друга и не вызывают изменения положения стрелки топливомера. Приращение ёмкости датчика Сх при изменении температуры на один градус зависит от значения этой ёмкости, которая уменьшается с выработкой топлива. Поэтому необходимо уменьшить напряжение компенсации Uef . Это достигается изменением напряжения Uk в диагонали питания моста 2 с помощью потенциометра R8, щётка которого связана с двигателем М через редуктор.
С помощью рассмотренной схемы измеряется не только количество топлива в отдельных баках, но и суммарный запас топлива в группах баков. Для этого с помощью переключателя и коммутирующих реле изменяются сопротивления резисторов R1 – R3 и ёмкость конденсатора С2, а датчики, установленные в баках, подключаются параллельно Сх.