

2.2 Расчёт регулятора скорости
В контур регулирования скорости входит: объект управления, состоящий из оптимизированного контура тока и механической части электропривода; датчик скорости; регулятор скорости.
Таким образом на рисунке 2.4 представлена структурная схема регулятора скорости.
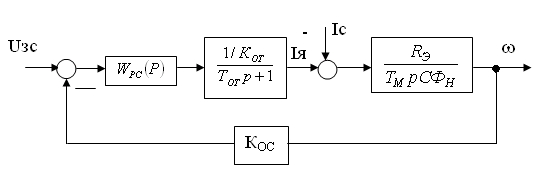
Рисунок 2.4 – Структурная схема регулятора скорости
Согласно заданию, требуется обеспечить статическую ошибку регулирования в пределах 5%. Применение пропорционального регулятора скорости обеспечивает статизм:
![]() (2.9)
(2.9)
Следовательно, статизм находится в пределах 5%, что возможно применение П-регулятора.
Передаточная функция регулятора скорости при оптимизации контура на модульный оптимум будет иметь вид:
![]() (2.10)
(2.10)
Статический коэффициент усиления регулятора скорости:
![]() (2.11)
(2.11)
где КОС - коэффициент обратной связи по скорости;
ТОС = 4Т = 0,02 с – постоянная времени интегрирования контура скорости;
![]() - коэффициент
передачи цепи обратной связи по скорости
с учётом что:
- коэффициент
передачи цепи обратной связи по скорости
с учётом что:
- максимальный сигнал задания на скорость ;
-
![]() .
.
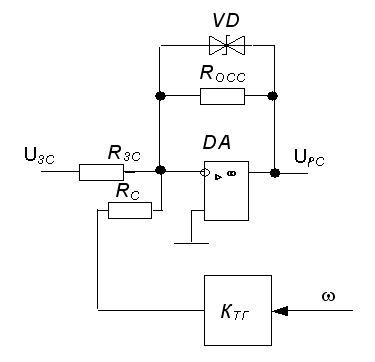
На рисунке 2.5 представлена функциональная схема регулятора скорости.
Р
ная
схема регулятора скорости
На рисунке 2.6 представлена структурная схема регулятора скорости.
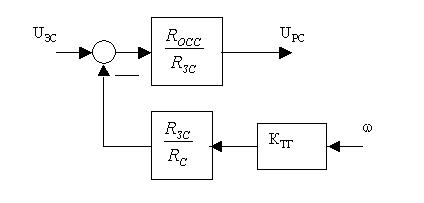
Рисунок 2.6 – Структурная схема регулятора скорости
В качестве датчика скорости выбираем тахогенератор типа ТП 214:
nH = 1000 об/мин;
UH = 200 B;
КТГ = 1,91 Вс.
Рассчитываем элементы функциональной схемы регулятора скорости по следующим соотношениям:
![]() (2.13)
(2.13)
Задание на скорость подаем с задатчика интенсивности скорости.
Поэтому задаемся
![]() .
В качестве
.
В качестве
![]() выбираем резистор типа МЛТ-0,125
сопротивлением 50 кОм.
выбираем резистор типа МЛТ-0,125
сопротивлением 50 кОм.
Рассчитаем
![]() :
:
![]() (2.14)
(2.14)
Выбираем резистор типа МЛТ-0.125 0.65 MОм.
Рассчитаем
![]() :
:
![]() (2.15)
(2.15)
Выбираем резистор типа МЛТ-0.125 0,5 MОм.
Выбираем стабилитрон VD типа КС 210Б:
напряжение стабилизации – 10 В;
разброс напряжения стабилизации - 0.7 В.
2.3 Расчет регулятора положения
На рисунке 2.7 представлена структурная схема контура положения.
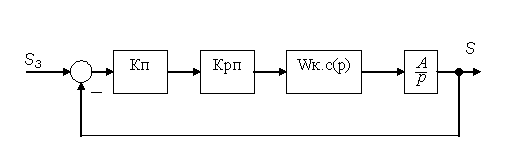
Рисунок 2.7 – Структурная схема контура положения
Передаточная функция регулятора будет иметь вид:
![]() (2.16)
(2.16)
Коэффициент передачи регулятора положения:
![]() (2.17)
(2.17)
где:
![]() (2.18)
(2.18)
 (2.19)
(2.19)
Коэффициент обратной связи:
![]() (2.20)
(2.20)
где SКР = 200 мм – критическое перемещение.
На рисунке 2.8 представлена функциональная схема регулятора положения.

Рисунок 2.8 – Функциональная схема регулятора положения
Принимаем резистор RЗП сопротивлением 50 кОм.
![]() (2.21)
(2.21)
Выбираем резистор RЗП марки МЛТ – 0.125, сопротивлением 50 кОм.
Выбираем резистор RОСП марки МЛТ – 0.125, сопротивлением 100 кОм.
2.4 Расчет задатчика интенсивности скорости
Для разгона и торможения двигателя с динамическим током, меньшим уставки токоограничения (IМАКС=2,5 IН) применяем задатчик интенсивности, преобразующий ступенчатый сигнал задания скорости в линейно изменяющийся во времени. Установившееся значение напряжения выхода задатчика интенсивности, которое подаётся на вход регулятора скорости, равно входному сигналу. То есть задатчик интенсивности скорости необходим для ограничения тока двигателя в переходных процессах.
Структурная схема задатчика интенсивности скорости приведена на рисунке 2.8.
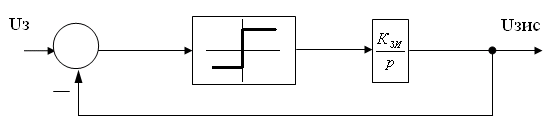
Рисунок 2.8 – Структурная схема задатчика интенсивности скорости
Считаем, что
электропривод разгоняется до номинальной
скорости, то есть
![]() ,
тогда время разгона:
,
тогда время разгона:
![]() (2.22)
(2.22)
Коэффициент передачи ЗИС:
![]() (2.23)
(2.23)
На рисунке 2.9 представлена функциональная схема задатчика интенсивности скорости.

Р
Принимаем конденсатор
![]() емкостью 2 мкФ.
емкостью 2 мкФ.
Принимаем:
R11 = R12 = 20 кОм;
R31 = R32 = 10 кОм.
![]() (2.24)
(2.24)
Выбираем резисторы R11 и R12 марки МЛТ–0.125, сопротивлением 20 кОм.
Выбираем резисторы R31 и R32 марки МЛТ–0.125, сопротивлением 10 кОм.
Выбираем резистор R21 марки МЛТ–0.125, сопротивлением 21 кОм.
Выбираем конденсатор СООС марки МБМ, емкостью 2мкФ.
Выбираем стабилитрон VD типа КС210Б:
- напряжение стабилизации - 10 В.