

56 Общий случай напряженного состояния в точке. Понятие о тензоре напряжений. Закон парности касательных напряжений.
![]()
 Совокупность
всех напряжений, возникающих на
множестве площадок, проходящих через
рассматриваемую точку, называется
напряженным
состоянием в точке. Для
его описания вырежем вокруг точки
элементарный параллелепипед, ребра
которого параллельны координатным осям
и имеют малые ддины dx,
dy,
dz
(рисунок 7.1,
а). В
силу малости параллелепипеда можно
считать, что напряжения на его гранях
совпадают с напряжениями на параллельных
им координатных площадках, проведенных
через рассматриваемую точку.
Совокупность
всех напряжений, возникающих на
множестве площадок, проходящих через
рассматриваемую точку, называется
напряженным
состоянием в точке. Для
его описания вырежем вокруг точки
элементарный параллелепипед, ребра
которого параллельны координатным осям
и имеют малые ддины dx,
dy,
dz
(рисунок 7.1,
а). В
силу малости параллелепипеда можно
считать, что напряжения на его гранях
совпадают с напряжениями на параллельных
им координатных площадках, проведенных
через рассматриваемую точку.
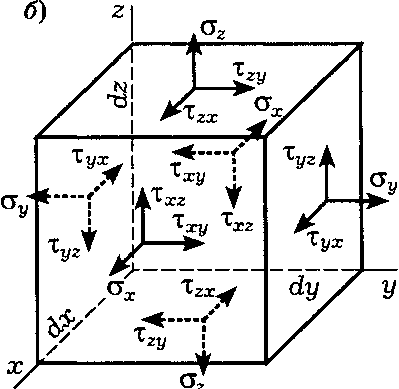
Действующие на гранях параллелепипеда напряжения можно разложить на нормальные δ (перпендикулярные к граням) и касательные τ (лежащие в плоскости граней) составляющие (рисунок б).
Нормальное напряжение имеет один индекс, указывающий ось, которой оно параллельно. Для обозначения касательного напряжения применяют два индекса: первый указывает на нормаль к площадке, на которой действует напряжение; второй индекс обозначает ось, которой оно параллельно.
Одноименные напряжения, которые действуют на противоположных гранях малого параллелепипеда, мало отличаются друг от друга, поэтому считаем их одинаковыми. Совокупность напряжений на гранях параллелепипеда образует тензор напряжений Тδ:
В строках содержатся компоненты тензора напряжений, действующие на одной площадке, в столбцах - параллельные одной координатной оси.
Теорема парности касательных напряжений. Рассмотрим условия равновесия выделенного параллелепипеда. Уравнения для сил выполняются тождественно, так как для каждой компоненты напряжений существует такая же по величине компонента, противоположно направленная и действующая на грани такой же площади (силами являются произведения напряжений на площади соответствующих граней). Из уравнения равновесия моментов сил относительно оси х следует
τyz dx dz dy - τzy dx dy dz = 0,
отсюда τyz = τzy.
Составляя аналогичные уравнения относительно осей у и z, получим, что τxy=τyx, τzx =τxz. Этот результат носит название теоремы парности касательных напряжений: одноименные касательные напряжения, действующие на двух взаимно перпендикулярных площадках, равны по величине и одновременно направлены либо к общему ребру, либо от него.
Теорема парности касательных напряжений справедлива для всех точек нагруженного тела, независимо от вида приложенных нагрузок и свойств материала.
С![]() ледствие.
Матрица
тензора напряжений симметрична
относительно своей главной диагонали.
Независимыми в ней являются шесть
компонент: δх,
δу,
δz,
τxy,
τyz,
τzx.
ледствие.
Матрица
тензора напряжений симметрична
относительно своей главной диагонали.
Независимыми в ней являются шесть
компонент: δх,
δу,
δz,
τxy,
τyz,
τzx.
Вектор можно задать тремя компонентами - числами, то тензор задается тремя векторами или девятью числами.
Перемещением данной точки сооружения называется изменение ее координат, вызванное деформацией системы. Перемещения могут быть линейными и угловыми.
57. Напряжения на произвольно ориентированной (косой) площадке.
Через любую точку твердого тела можно провести бесконечное множество площадок. Выделим одну из них и рассмотрим элементарную пирамидку, образованную координатными гранями и произвольной площадкой (рисунок 7.2, а).
Пусть нормаль v к площадке составляет с осями координат углы, косинусы которых обозначим l, т, п:
cos(v, х) = l; cos(v, у) = т ; cos(v, z)=n.
Величины l, m, n называются направляющими косинусами нормали v. Для них выполняется известное из геометрии условие l2 + m2 + n2 = 1.
Площадь косой площадки обозначим А. Площади координатных граней Ах, Ау, Az (индекс указывает нормаль к площадке) связаны с А следующими соотношениями:
Ах = Аl; Ау= Am; Az = An . (7.3)
Приложим к выделенной элементарной пирамиде действующие на ее гранях напряжения (рисунок 7.2, б). Проекции вектора полного напряжения pv на косой площадке обозначим pvx, pvz, pvz.
Рассмотрим условия равновесия пирамиды. Составим суммы проекций сил на координатные оси х, у, z:
pvxA – σxAx – τyxAy – τzxAz = 0
pvzA – τxyAx – σyAy – τzyAz = 0 (7.4)
pvz A – τxzAx– τyzAy – σzAz = 0
Подставим в систему (7.4) соотношения (7.3). Сократив их на А, получим выражения для компонентов вектора напряжения на произвольной косой площадке через координатные напряжения:
pvx = σxl + τyxm + τzxn
pvz = τxyl + σym + τzyn (7.5)
pvz = τxzl + τyzm + σzn
Модуль полного напряжения на площадке
![]()
Т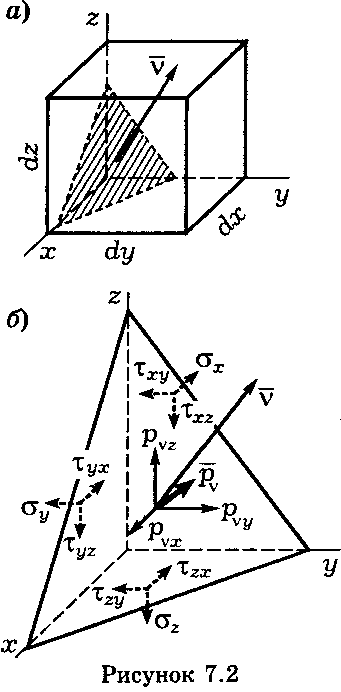 аким
образом, с помощью компонентов тензора
напряжений на трех координатных площадках
можно полностью описать напряженное
состояние в точке, т. е. определить
напряжения на любой площадке,
проведенной через рассматриваемую
точку.
аким
образом, с помощью компонентов тензора
напряжений на трех координатных площадках
можно полностью описать напряженное
состояние в точке, т. е. определить
напряжения на любой площадке,
проведенной через рассматриваемую
точку.
58. Эллипсоид напряжений.
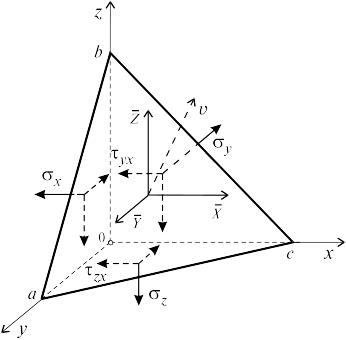
Из напряженного тела в окрестности произвольной точки выделим элементарныйобъем в виде тетраэдра (рис. 10.2).
Ориентация площадки в пространстве задается направляющими косинусами нормали v к ней l = cos (x, v), m = cos (y, v), n == cos (z, v).
Вектор полного
напряжения на произвольной площадке
abc спроецируем на оси x, y и z. Обозначим
эти проекции через
![]() ,
,
![]() ,
,
![]() .
Обозначая площадь треугольников abc,
a0b, b0c, a0c через dF, dFx , dFy , dFz ,
соответственно будем иметь:
.
Обозначая площадь треугольников abc,
a0b, b0c, a0c через dF, dFx , dFy , dFz ,
соответственно будем иметь:
dFx = dFl; dFy = dFm; dFz = dFn. (10.3)
Проецируя все силы, действующие на выделенный элемент, последовательно на оси x, y, z и с учетом (10.3) получим: X = x l + yx m + zx n; Y = yx l + y m + zy*n; (10.4) Z = zx l + zy m + z n.
Выразим нормальное напряжение v на наклонной площадке через X, Y, Z:
v = X l + Y m + Z n (10.5)
Отcюда, с учетом (10.3) получим
v = x l 2 + y m 2 + z n 2 + 2 yzmn + 2 zxnl + 2 xylm . (10.6)
 Рассмотрим множество
секущих площадок произвольнойориентации,
проходящих через исследуемую точку. По
нормали к каждой площадке отложим
отрезок r = f (v ),
координаты
конца вектора которого будут
следующими: x =
r
l; y =
r
m; z =
r
n.
Рассмотрим множество
секущих площадок произвольнойориентации,
проходящих через исследуемую точку. По
нормали к каждой площадке отложим
отрезок r = f (v ),
координаты
конца вектора которого будут
следующими: x =
r
l; y =
r
m; z =
r
n.
Исключая из (10.6) направляющие косинусы, получим
![]() v r 2 = x x 2 + y y 2 + z z 2 + 2 yzy z + 2 xyx y + 2 xzx z .
(10.7)
v r 2 = x x 2 + y y 2 + z z 2 + 2 yzy z + 2 xyx y + 2 xzx z .
(10.7)
Принимая
обозначение
,
где k произвольная постоянная, из (10.6) получим:
x x 2 + y y 2 + z z 2 + 2 yzy z + 2 xyx y + 2 xzx z = k. (10.8)
Из курса аналитической геометрии известно, что (10.8) представляет собой уравнение поверхности второго порядка в системе координат x, y, z. Следовательно путем поворота системы координат уравнение (10.8) можно преобразовать таким образом, чтобы попарные произведения исчезли, или иначе говоря коэффициенты попарных произведений принимали нулевые значения.
Это значит, что в произвольной точке напряженного тела существует такое положение системы координат x, y, z, в которой касательные напряжения xy , xz , yz равны нулю. Такие оси называются главными осями. Соответствующие им взаимно перпендикулярные площадки называются главными площадками, а нормальные напряжения на них главными напряжениями. Принимаются такие обозначения: 1 2 3.
Если в окрестности рассматриваемой точки определены положение главных площадок и главные напряжения, то существенно упрощается система уравнений (10.4). Они принимают вид: X = 1 l; Y = 2 m; Z = 3 n.
.
Так как l 2 + m 2 + + n 2 =1, то получим:
![]() .
.
С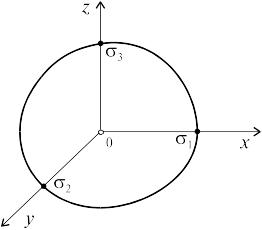 ледовательно,
геометрическое место концов вектора
полного напряжения Р (X, Y, Z)
образует эллипсоид, полуосям которого
являются главные напряжения 1,
2,
3
(рис. 10.3).
Полученный эллипсоид носит название
эллипсоида напряжений. В случае
равенства двух главных напряжений
эллипсоид принимает форму тела вращения.
Тогда каждая плоскость, проходящая
через ось вращения становится главной.
В случае, если все три главных напряжения
равны между собой, то эллипсоид принимает
форму сферы и в исследуемой точке все
плоскости являются главным
ледовательно,
геометрическое место концов вектора
полного напряжения Р (X, Y, Z)
образует эллипсоид, полуосям которого
являются главные напряжения 1,
2,
3
(рис. 10.3).
Полученный эллипсоид носит название
эллипсоида напряжений. В случае
равенства двух главных напряжений
эллипсоид принимает форму тела вращения.
Тогда каждая плоскость, проходящая
через ось вращения становится главной.
В случае, если все три главных напряжения
равны между собой, то эллипсоид принимает
форму сферы и в исследуемой точке все
плоскости являются главным