

Вопрос №1 Тяговый расчет дорожных машин с ПХО
Тяговый расчет базируется на уравнении тягового баланса, которое отражает взаимосвязь всех сил действующих на машину при перемещении по опорной поверхности.
Рсц ≥ Ро ≥ W ,
где Рсц – сила сцепления движителя с опорной поверхностью, которая зависит от свойств опорной поверхности и типа ходового оборудования;
Ро – окружная сила на ведущих колесах;
W – общая сила сопротивления при движении машины;
Колесный движитель ДМ преобразует подводимый к нему от двигателя крутящий момент в силу тяги машины. Движение машины передаваемое двигателю и приложенная к ведущему колесу – максимальная окружная сила.
Ро = Ро*/nк ,
где nк – число ведущих колес.
КПД η = Nвых/Nвх ,
Передаточное число U =ωвх/ωвых ,
Коэффициент преобразования Кпр = Мвых/Мвх = η · U ,
Мкр = η · U · Мдв ,
Nдв = Мдв · ωдв = 2 · π · Мдв · nдв ,
Окружная сила на ведущем колесе Ро* = Мкр/rк ,
Тогда Ро = Ро*/nк = Мкр/(rк·nк) = η·U·Мдв/(rк·nк) = η·U·Nдв/(2·π·nдв·nк·rк)
Рсц = φсц·Gсц ,
φсц = 0,1…0,6 – коэффициент сцепления
Gсц – сцепная сила тяжести, т.е нагрузка на ведущие колеса
Gсц = (В/А)·G ,
где В – числа ведущих колес, А – общее число колес.
Сила сопротивления
W = Wпер + Wин + Wвет + Wраб ,
1)Wпер – сила сопротивления передвижению машины
Wпер = (f + i)·G ,
где f – коэффициент сопротивления передвижению f=0,01…0,3,
i – коэффициент уклона i = 0,1…0,15.
2)Wин – сила инерции на движение машины
Wин = G·V/g·tр ,
где V – скорость движения, tр – время разгона.
3)Wвет – сопротивление ветровой нагрузки
Wвет = Рвет·F ,
где Рвет – удельное сопротивление ветровой нагрузки (давление ветра),
F – площадь.
4)Wраб – сопротивление рабочему процессу (для каждой машины рассчитывается индивидуально).
Очень часто на 1м этапе проектирования отсутствуют сведения о силовой установке машины, т.е. Ро нельзя найти. В этом случае Ро ≈ W , а W можно найти
N=W·V/η .
Вопрос №2 Тяговый расчет дорожных машин с ГХО
Тяговый расчет базируется на уравнении тягового баланса, которое отражает взаимосвязь всех сил действующих на машину при перемещении по опорной поверхности.
Рсц ≥ Ро ≥ W ,
где Рсц – сила сцепления движителя с опорной поверхностью, которая зависит от свойств опорной поверхности и типа ходового оборудования;
Ро – окружная сила на ведущих колесах;
W – общая сила сопротивления при движении машины;
Гусеничный движитель ДМ преобразует подводимый к нему от двигателя крутящий момент в силу тяги машины. Движение машины передаваемое двигателю и приложенная к ведущей звездочке максимальная окружная сила.
Ро = Ро*/nзв ,
где nзв – число ведущих звездочек.
КПД η = Nвых/Nвх ,
Передаточное число U =ωвх/ωвых ,
Коэффициент преобразования Кпр = Мвых/Мвх = η · U ,
Мкр = η · U · Мдв ,
Nдв = Мдв · ωдв = 2 · π · Мдв · nдв ,
Окружная сила на ведущей звездочке Ро* = Мкр/rзв ,
Тогда Ро = Ро*/nзв = Мкр/(rзв·nзв) = η·U·Мдв/(rзв·nзв) = η·U·Nдв/(2·π·nдв·nзв·rзв) ,
Рсц = φсц·Gсц ,
φсц = 0,1…0,6 – коэффициент сцепления
Gсц – сцепная сила тяжести, т.е нагрузка на гусеницы
Gсц = G ,
Сила сопротивления
W = Wпер + Wин + Wвет + Wраб ,
1)Wпер – сила сопротивления передвижению машины
Wпер = (f + i)·G ,
где f – коэффициент сопротивления передвижению f=0,01…0,3,
i – коэффициент уклона i = 0,1…0,15.
2)Wин – сила инерции на движение машины
Wин = G·V/g·tр ,
где V – скорость движения, tр – время разгона.
3)Wвет – сопротивление ветровой нагрузки
Wвет = Рвет·F ,
где Рвет – удельное сопротивление ветровой нагрузки (давление ветра),
F – площадь.
4)Wраб – сопротивление рабочему процессу (для каждой машины рассчитывается индивидуально).
Очень часто на 1м этапе проектирования отсутствуют сведения о силовой установке машины, т.е. Ро нельзя найти. В этом случае Ро ≈ W , а W можно найти
N=W·V/η .
Вопрос №3 Механический привод машин. Классификация, основные элементы.
Привод – это совокупность устройств для сообщения движения и усилия исполнительным механизмам машин.
Привод включает силовое оборудование (двигатель), трансмиссию и систему управления.
Привод выбирают из условий:
- технологии производства работ;
- условий эксплуатации;
- режимов нагружения.
Приводы классифицируют по следующим признакам:
по значимости:
-основные (ходовое и рабочее оборудование);
- вспомогательные.
по типу трансмиссии:
- с механическими трансмиссиями;
- с электрическими трансмиссиями;
- с гидравлическими трансмиссиями;
- с комбинированными трансмиссиями.
по типу системы управления:
- с механической рычажной;
- с электрической;
- с гидравлической;
- с пневматической;
- с комбинированной.
Мощность привода определяется:
Nро = Nдв·η ; Nро = Т·ω; Nро = Р·V.
Т – крутящий момент сопротивления, преодолеваемый исполнительным механизмом;
ω - угловая скорость
Р – усилие внешнего сопротивления
V – линейная скорость исполнительных механизмов
N = Т·V – идеальный вариант
Для оценки работы привода используют его внешнюю характеристику – зависимость ω=f(Т)

Вопрос №4 Гидравлический привод машин. Классификация, основные элементы.
Гидроприводы могут быть двух типов: гидродинамические и объёмные.
в гидродинамических приводах используется в основном кинетическая энергия потока жидкости;
в объёмных гидроприводах (ОГП) используется потенциальная энергия давления рабочей жидкости.
ОГП классифицируют по следующим признакам:
1)по конструктивным признакам: открытые и закрытые.
2)по виду энергопреобразования: шестеренные, поршневые, пластинчатые.
3)по регулированию параметров: регулируемые, ступенчато-регулируемые, непрерывно-регулируемые.
4)по назначению: основные, вспомогательные.
4)по количеству потоков рабочей жидкости: 1-но,2-х,3-х,4-х поточные.
5)по степени управления: с ручной, с электрической, с гидравлической, с электро-гидравлической.
Г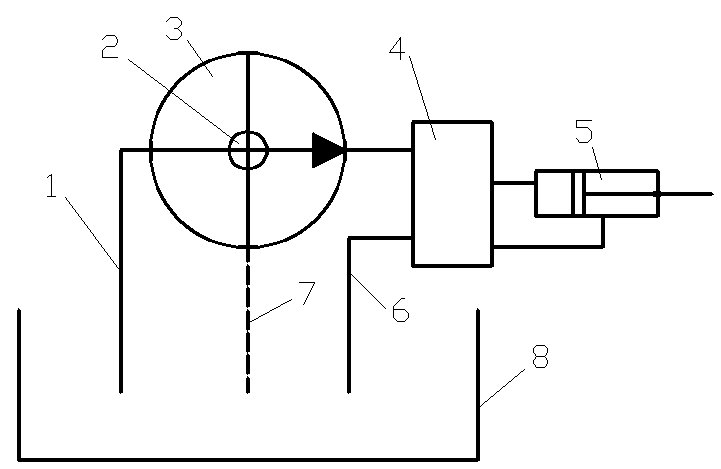 идрообъемный
привод.
идрообъемный
привод.
1 – всасывающая линия;
2 – ведущий вал;
3 – насос;
4 – гидрораспределитель;
5 – гидроцилиндр;
6 – сливная линия;
7 – дренажная линия;
8 – бак.
Э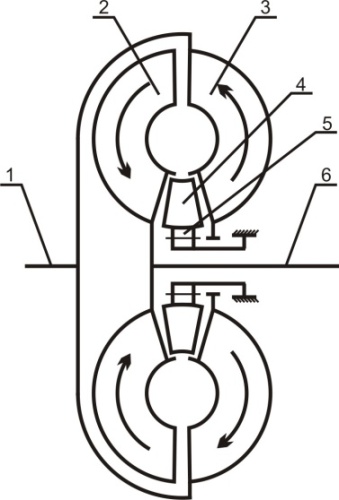 лементами
гидродинамического привода являются:
лементами
гидродинамического привода являются:
гидромуфта;
гидротрансформатор.
Гидротрансформатор:
1 – входной вал; 2 – турбинное колесо;
3 – насосное колесо; 4 – реакторное колесо;
5 – обгонная муфта; 6 – выходной вал
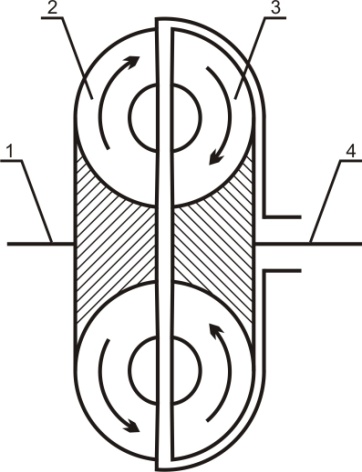
Гидромуфта
1 – входной вал (от ДВС);
2 – насосное колесо;
3 – турбинное колесо;
4 – выходной вал (на ИМ)
5. Электрический привод машин. Классификаци, основные элементы.
В комбинированных электроприводе первичным является ДВС, который приводит во вращение электрогенератор, к-ый в свою очередь питает ЭД. Использ. На крупных дорожных машинах большой мощности.
Преимущество: 1. Возможность реверсирования, 2. Высокий КПД, 3. Долговечность, 4. Надёжность, 5. Эксплуатация при низких температурах.
Наиболее распространены ЭД переменного тока. Обычно используются трёхфазные асинхронные двигатели, которые в зависимости от мощности имеют либо короткозамкнутый при менее 10 кВт, или фазовый ротор – более10 кВт. Данные двигатели могут выдерживать большие кратковременные перегрузки, однако обладают высокой чувствительностью к колебаниям напряжения сети.
Привод одноковшов экскаватора применяется спец крановый асинхрон ЭД. Они хорошо работают в участках пуска и торможения, однако не могут саморегул., что тербует преобразования частоты питания. Двигатели с фазовы ротором требуют для пуска боль ток, при не возможно регулировать скорость.
ЭД постоянного тока считается наиболее подходящим для привода машин с тяговым режимом работы, они обеспечивают плавность пуска и торможения. Однако их масса и габаритыв 1,5 …2 раза выше других. Обычно их применяют в экскаваторах средней и большой мощности.
В
экскават ср мощности применяют схему:
ДВС 3х
обмоточ генератор
ЭД
с усилителем. Преимущество : постоянная
готовность к работе, простота пуска,
управление, реверс, высокий КПД.
3х
обмоточ генератор
ЭД
с усилителем. Преимущество : постоянная
готовность к работе, простота пуска,
управление, реверс, высокий КПД.
6. Основные факторы, определяющие взаимодействие рабочих органов машины с грунтом: параметры рабочего органа; прочностные характеристики грунтов; сопротивление грунта копанию.
Грунты принято делить на следующие классы: скальные, полускальные, крупнообломочные, пещаные, глинистые. Скальный грунт – это сцементированный, водоустойчивый и практически не сжимаемые горные породы с прочностью σ≥5МПа. Полускальные – это сцементированные горные породы с σ<5МПа. Крупнообломочные – это не сцементированные куски пород образующие два первых класса. Пещаные – это не сцементированные частицы горных пород с размерами от 0,05 – 2 мм. Глинистые – это не сцементированные частицы горных пород с преобладающим размером частиц меньше 0,005. В настоящее время принята классификация грунтов профессора Зеленина, который в первые дал количественную оценку всех грунтов по трудности их разработки, (в её основе лежит оценка физико-механических свойств) с помощью динамического плотномера.
При взаимодействии грунта с рабочим органом в грунте развиваются силы сопротивления. Эти силы зависят от 3-х основ. параметров: –технологии разработки грунта; –физ-мех. свойств грунта; –геометрических характеристик рабочего органа.
К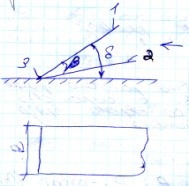 основным характеристикам относятся:
основным характеристикам относятся:
В
– ширина режущей кромки
 - угол заострения (25-30 град),
- угол заострения (25-30 град),
 - угол резания (30-40 град)
- угол резания (30-40 град)
При взаимодействии рабочего органа с грунтом клин действует на грунт с силой Р которая вызывает со стороны грута силу противодействия Р0:
1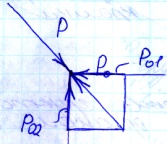 )
При резании грунта. Для инж. расчетов
используют следующую формулу связывающую
силы сопротивления с геометрией р.о. и
свойствами грунта: Р01=Рк
= кр*В*с;
кр–удельн.
сопр. грунта резанию(0,012–3,5МПа) ; с–
толщ. срез. грунта
)
При резании грунта. Для инж. расчетов
используют следующую формулу связывающую
силы сопротивления с геометрией р.о. и
свойствами грунта: Р01=Рк
= кр*В*с;
кр–удельн.
сопр. грунта резанию(0,012–3,5МПа) ; с–
толщ. срез. грунта
2)
При копании грунта. Для инж. расчетов
силу сопротивления копания рассчитывают
по той же ф., что и силу сопротивления
резания учитывая другие силы сопротивления.
Учет всех остальных сил осуществляется
за счёт увеличения коэффициента удельного
сопротивления копанию:Р01=Рк=
к1*В*с
к1=0,018–4,5МПа
Норм. сост. Р02= ,
где
,
где
 -коэф.
пропорциональности(0,1-0,8) зависит от
свойств грунта. Степени затуп. раб. орг.,
а также от расположения р.о.
-коэф.
пропорциональности(0,1-0,8) зависит от
свойств грунта. Степени затуп. раб. орг.,
а также от расположения р.о.
В зависимости от свойств грунта при резании р.о образуется 3 вида стружки:
 сыпучий
пластинчатый скалывающийся
сыпучий
пластинчатый скалывающийся