

17. Скорость и ускорение любой точки тела, вращающегося вокруг неподвижной оси.
Угловой
скоростью называется
вектор ![]() ,
численно равный первой производной от
угла поворота по времени и направленный
вдоль оси вращения в
,
численно равный первой производной от
угла поворота по времени и направленный
вдоль оси вращения в
направлении
(
и
всегда
направлены в одну сторону).
![]()
|
. |
(2.4.1) |
|
Если ω – const, то имеет место равномерное вращение тела вокруг неподвижной оси. Пусть v – линейная скорость точки М. За промежуток времени dt точка М проходит
путь dr = vdt.
В то же время dr = Rdφ (dφ - центральный угол). Тогда, можно получить связь
линейной скорости и угловой:
|
. |
(2.4.2) |
|
В
векторной форме ![]() .
.
Вектор ![]() ортогонален
к векторам
и
и
направлен в ту же сторону, что и векторное
произведение
ортогонален
к векторам
и
и
направлен в ту же сторону, что и векторное
произведение ![]() .
.
Введем
вектор углового ускорения ![]() для
характеристики неравномерного вращения
тела:
для
характеристики неравномерного вращения
тела:
|
. |
(2.4.3) |
|
Вектор ![]() направлен
в ту же сторону, что и
при
ускоренном вращении
направлен
в ту же сторону, что и
при
ускоренном вращении ![]() ,
,
а ![]() направлен
в противоположную сторону при замедленном
вращении
направлен
в противоположную сторону при замедленном
вращении ![]() (рис.
2.13).
(рис.
2.13).
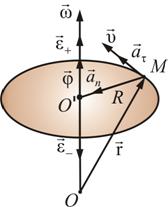 Рис.
2.13
Рис.
2.13
Как и любая точка твердого тела, точка М имеет нормальную и тангенциальную составляющие ускорения. Выразим нормальное и тангенциальное ускорение точки М через угловую скорость и угловое ускорение:
|
|
|
|
|
aτ = Rε; |
(2.4.4) |
|
|
|
|
|
Формулы простейших случаев вращения тела вокруг неподвижной оси:
равномерное вращение ε = 0; ω = const; φ = φ0 ± ωt,
равнопеременное
вращение ![]() .
.
18. Плоское движение твердого тела. Задание движения.
При плоском движении все точки тела двигаются параллельно какой либо неподвижной плоскости.
Плоским или плоскопараллельным движением твердого тела называется такое его движение, при котором каждая точка тела движется в плоскости, параллельной некоторой неподвижной плоскости, например движение колеса вагона на прямолинейном участке пути.
Рассмотрим
движение плоской фигуры, представляющей
собой сечение тела, н аходящегося
в плоском движении, плоскость
аходящегося
в плоском движении, плоскость ![]() ,
параллельной неподвижной плоскости
,
параллельной неподвижной плоскости ![]() (рис.
2.15). При плоском движении все точки
тела, лежащие на прямой
(рис.
2.15). При плоском движении все точки
тела, лежащие на прямой ![]() ,
перпендикулярной к сечению
,
перпендикулярной к сечению ![]() ,
т. е. к плоскости
,
движутся
,
т. е. к плоскости
,
движутся
тождественно. Поэтому вместо плоского движения тела достаточно изучить движение плоской фигуры в ее плоскости.
В кинематике твердого тела изучаются три основных вопроса: задание движения тела, вычисление скорости какой-либо его точки и вычисление ее ускорения. Кроме этих вопросов изучаются и другие вопросы, представляющие научный и технический интерес.
Положение
движущейся плоской фигуры в ее плоскости
относительно неподвижной системы
осей координат ![]() определяется
п
определяется
п оложением
какого-либо отрезка, жестко связанного
с этой фигурой (рис. 2.16).
оложением
какого-либо отрезка, жестко связанного
с этой фигурой (рис. 2.16).
Положение
отрезка![]() можно
определить, зная радиус-вектор
можно
определить, зная радиус-вектор ![]() точки
точки ![]() и
угол
и
угол ![]() ,
который образует отрезок
с
осью
,
который образует отрезок
с
осью ![]() .
Точку
называют полюсом.
При движении тела величины
и
будут
изменяться в зависимости от времени,
т. е.
.
Точку
называют полюсом.
При движении тела величины
и
будут
изменяться в зависимости от времени,
т. е.
![]() ; (2.44)
; (2.44)
![]() . (2.45)
. (2.45)
Уравнения (2.44) и (2.45) называются уравнениями плоского движения твердого тела.
Теорема. Всякое перемещение плоской фигуры в ее плоскости можно представить как совокупность двух перемещений: 1) поступательного перемещения, зависящего от выбора полюса; 2) вращательного перемещения вокруг полюса; угол и направление поворота от выбора полюса не зависят.