

4.1.5 Микрогироскопы rr-типа
В МГ RR-типа движение ИМ в РД и ВК носит вращательный характер. Сочетание относительного, вращательного движения ИМ в РД и ее переносного, вращательного движения в ВК приводит к возникновению момента сил инерции Кориолиса.
Момент, создаваемый силами инерции Кориолиса, называется гироскопическим моментом, эффектом или реакцией и проявляется в давлении оси вращающегося тела на опоры. Гироскопический момент для случая, когда ось ротора z составляет с осью прецессии х постоянный угол. Находят, проектируя угловую скорость прецессии с направление оси ротора и направление, перпендикулярное к ней. Гироскопический момент вызывается только перпендикулярной составляющей cosin a, и величина его вычисляется по формуле: Mr=CQcosina.[2]
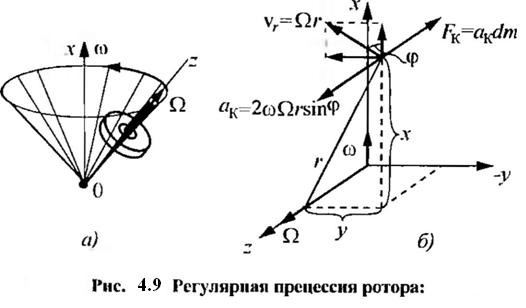
а) конус прецессии; б) определение силы инерции Кориолиса

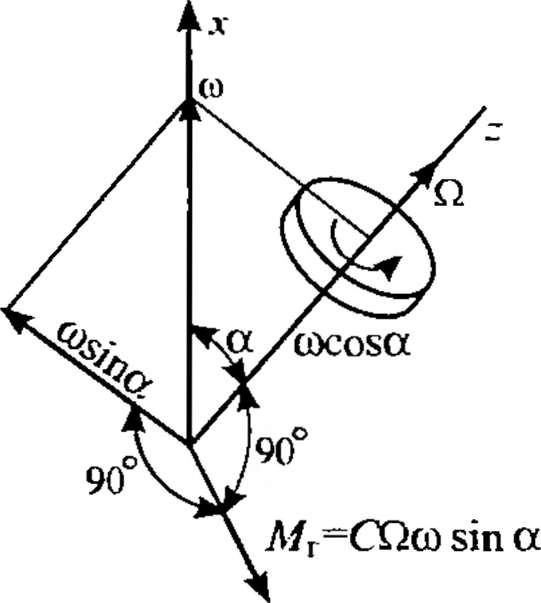
Рис. 4.11. Гироскопический момент симметричного ротора в случае его прецессии по конусу
В России разработкой гироскопов RR-типа занимается ЦНИИ “Электроприбор”, схема этого датчика и его микроструктура представлены на рис 4.12. [2]
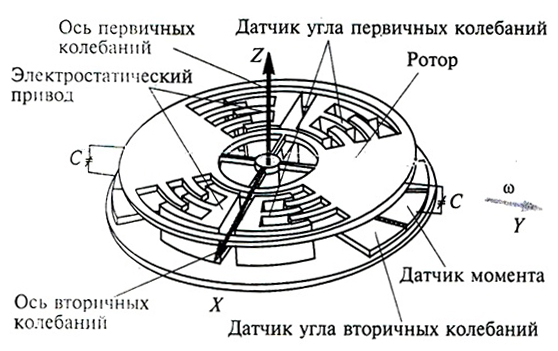
Рис.4.12 Схема RR-гироскопа ЦНИИ “ Электроприбор”.
5. Характеристики ммг
В таблице 3 приводится сравнение характеристик ММГ, известных фирм и учебных учреждений как: Murata, Epson, Silicon Sensing, Honeywell, Analog Devices, ЦНИИ "Электроприбор", ГУАП. Можем заметить что наилучшими характеристиками и большим диапазоном измерений является прибор фирмы Murata, а вот прибор отечественного производства ЦНИИ "Электроприбор" обладает не лучшими характеристиками и необходим в доработке.
Таблица 3.
Компания |
Murata |
Epson |
Silicon Sensing |
Honeywell |
Analog Devices |
ЦНИИ "Электроприбор" |
ГУАП |
Прибор |
ENC-03R |
XV-3500CV |
CRS03-02 |
CG178AU01 |
ADXRS401 |
RR—ММГ |
АММГ |
Диапазон измерения угловых скоростей, °/с |
±300 |
±100 |
±100 |
±75 |
±75 |
±50 |
±250 |
Коэффициент преобразова-ния, мВ/°/с |
0.67 |
0,67 |
20 |
26,7 |
15 |
1 |
1 |
Нестабильность коэф. шага преобразова-ния, % |
— |
— |
— |
— |
0,1 |
0,1 |
0,1 |
Дрейф нуля, не более, °/с |
— |
- |
0,55 |
2,0 |
— |
— |
— |
Рабочий диапазон частот, Гц |
50 |
200 |
10 |
— |
40 |
40 |
70 |
Порог чувствитель-ности, °/с |
— |
— |
— |
— |
— |
<0,1 |
<0,1 |
Время готовности, с |
— |
— |
— |
— |
— |
<2 |
<0,05 |
Напряжение питания, В |
2,7...5,25 |
3 |
5 |
5 |
5 |
5 |
5 |
Потребляе-мый ток, не более. мА |
5 |
1,7 |
35 |
35 |
— |
— |
35 |