

Введение
Практически с момента своего создания автомобили стали представлять потенциальную опасность для окружающих и участников движения. Поскольку полностью избежать дорожно-транспортных происшествий пока не представляется возможным, автомобиль совершенствуется в направлении снижения вероятности аварии и минимизации ее последствий.
Активная безопасность автомобиля — комплекс его свойств, снижающих возможность возникновения дорожно-транспортных происшествий.
Пассивная безопасность — конструктивные мероприятия, направленные на сведение к минимуму вероятности ранений человека при ДТП. Она подразделяется на внешнюю и внутреннюю.
Целью курсового проекта является закрепление студентами знаний, полученных в лекционном курсе «Безопасность транспортных средств» и связанных с пониманием влияния свойств транспортных средств и условий движения на возможность и целесообразность совершения обгона.
В ходе выполнения курсового проекта должны быть определены:
-
значения времени ( ),
пути (
),
пути ( )
и скорости (
)
и скорости ( )
при выполнении завершенного обгона;
)
при выполнении завершенного обгона;
-
значения времени ( ),
пути (
),
пути ( ),
необходимые для выполнения незаверенного
обгона при заданной величине замедления
автомобиля после решения водителя
прекратить обгон.
),
необходимые для выполнения незаверенного
обгона при заданной величине замедления
автомобиля после решения водителя
прекратить обгон.
1. Кинематика поворотов. Расчёт сил действующих на авто при повороте.
1.1 Кинематика поворота автомобиля.
Существуют следующие способы поворота колесной машины.
Поворот передних управляемых колес.
Совместный поворот передних и задних управляемых колес.
Поворот бортом без управляемых колес за счет отключения передачи вращающего момента на правые или левые неуправляемые колеса и торможение колес, внутренних по отношению к кривой поворота. Поворот без управляющих колес может быть осуществлен созданием разных скоростей вращения колес левого и правого бортов машины (по аналогии с гусеничной машиной).
Поворот путем комбинации рассмотренных выше способов.
Поворот за счет поворота передней части остова машины при сочлененной раме.
Третий
способ поворота (бортом) имеет смысл
использовать на машинах со всеми
одинакового размера ведущими колесами
большого диаметра. При этом упрощается
привод к ведущим колесам и компоновка
передних колес, однако, повышается износ
шин.
На
рис.1 схематически показан поворот
колесной машины с управляемыми передними
колесами (наиболее типичный
вариант).
Мгновенный
цент поворота О1 находится
в точке пересечения перпендикуляров к
векторам скоростей движения колес.
Расстояние от центра поворота О1 до
оси заднего моста автомобиля принято
называть радиусом поворота R
= L·ctg α.
При повороте передних управляемых колес
машины на одинаковый угол такое
пересечение будет невозможно, так как
перпендикуляры к векторам скоростей
этих колес будут параллельны.
В
этом случае движение на повороте
сопровождалось бы скольжением управляемых
колес вбок, управляемость машины
ухудшалась бы, а износ шин и сопротивление
движению возросли.
Как
следует из рис.1, чистое качение управляемых
колес машины без скольжения при движении
на криволинейных участках возможно
лишь в том случае, если между углами
поворота внутреннего α1 (ближнего
к центру поворота) и внешнего α2 (удаленного
от центра поворота) колес будет следующее
соотношение:
ctg
α1 =
(R +
0,5В)/L; ctg
α2 =
(R –
0,5В)/L или
![]() ,
где α1 и α2 –
соответственно углы поворота внутреннего
и внешнего управляемых колес;
В –
расстояние между осями шкворней
поворотных цапф (приближенно может быть
принято равным ширине колеи);
L –
база машины.
Выполнение
этого условия достигается с помощью
шарнирного четырехзвенника,
называемого рулевой
трапецией,
соединяющей между собой управляемые
колеса. Подбирая соответствующие
значения параметров рулевой трапеции,
геометрию элементов и кинематику в
целом, получают соотношение между
углами α1 и α2 ,
близкое к теоретическому. Однако рулевая
трапеция не может обеспечить точно
заданное (теоретическое) соотношение
между углами поворота колес при различных
их величинах, в тех пределах, в которых
это необходимо
на автомобилях.
,
где α1 и α2 –
соответственно углы поворота внутреннего
и внешнего управляемых колес;
В –
расстояние между осями шкворней
поворотных цапф (приближенно может быть
принято равным ширине колеи);
L –
база машины.
Выполнение
этого условия достигается с помощью
шарнирного четырехзвенника,
называемого рулевой
трапецией,
соединяющей между собой управляемые
колеса. Подбирая соответствующие
значения параметров рулевой трапеции,
геометрию элементов и кинематику в
целом, получают соотношение между
углами α1 и α2 ,
близкое к теоретическому. Однако рулевая
трапеция не может обеспечить точно
заданное (теоретическое) соотношение
между углами поворота колес при различных
их величинах, в тех пределах, в которых
это необходимо
на автомобилях.
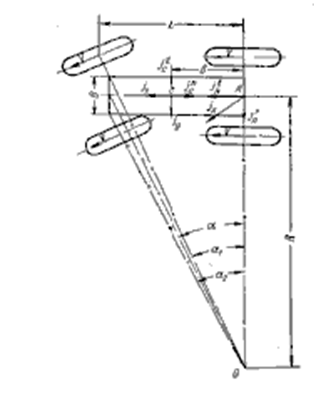
Рис.1. Схема, иллюстрирующая поворот машины с управляемыми передними колесами.
Отклонение
от теоретических значений углов поворота
друг от друга тем меньше, чем правильнее
выбраны размеры звеньев, составляющих
рулевую трапецию.
При
крутых поворотах отклонение действительных
углов поворота колес от теоретических
– наибольшее. Однако и в этом случае по
соображениям безопасности (надежности
управления) оно не должно превосходить
1,50.
Установим
зависимость между радиусом поворота R,
базой машины L и
углом поворота управляемых колес α.
Если пренебречь небольшим отличием
углов поворота управляемых колес и
считать, что α1 = α2 = α,
то, воспользовавшись схемой рис.6, можно
записать следующую зависимость:
![]() .
Следовательно,
угол поворота колес при движении по
кривой определяется радиусом её кривизны.
Для малых значений угла α формула
примет вид (tg
α ≈α):
.
Следовательно,
угол поворота колес при движении по
кривой определяется радиусом её кривизны.
Для малых значений угла α формула
примет вид (tg
α ≈α):
![]() ,
где α -
средний угол поворота управляемых колес
в радианах.
Уменьшение
радиуса поворота может быть получено
в том случае, если все колеса машины
будут управляемы (второй способ поворота),
тогда (рис.2):
,
где α -
средний угол поворота управляемых колес
в радианах.
Уменьшение
радиуса поворота может быть получено
в том случае, если все колеса машины
будут управляемы (второй способ поворота),
тогда (рис.2):
![]() .
.

Рис.2. Схема поворота машины с задними и передними управляемыми колесами.
Составляющая Рf толкающей силы Рк затрачивается на преодоление силы сопротивления качению колес. Сила Рf зависит от угла поворота колес α. Из рис.8 видно, что при одинаковой толкающей силе Рк составляющая Рf (Рf = Рк · cos α) меньше при более крутом повороте. Известно, что сила сопротивления качению колеса, повернутого под углом к направлению движения, повышается с увеличением угла его поворота, а активная сила Рf, толкающая колесо, уменьшается. Следовательно, баланс сил и скорость поступательного движения колеса можно сохранить на повороте (оставив её такой же, как при прямолинейном движении) только за счет увеличения касательной силы тяги Рк на ведущих колесах, то есть путем повышения момента двигателя без перехода на пониженную передачу. Поворот возможен только в том случае, когда сцепление управляемых колес с почвой больше толкающего усилия: G1φ > Рк, где G1- вертикальная нагрузка, действующая на управляемые колеса; φ - коэффициент сцепления колес с опорной поверхностью дороги. Учитывая, что Рк =Рf /cos α , можно записать: φ > Рf / G1cos α или: φ cos α >f , (2) где f – коэффициент сопротивления качению колеса. Из этого выражения видно, что поворот автомобиля может быть осуществлен только в том случае, если коэффициент сопротивления качению меньше произведению коэффициента сцепления на косинус угла поворота колес. Если сцепление колес с дорогой плохое и величина f больше этого произведения, то управляемые колеса будут двигаться юзом и поворот не может быть реализован, машина теряет управляемость. На скользкой дороге коэффициенты φ и fблизки между собой, вследствие чего управляемость автомобиля снижается.
Условие осуществления поворота автомобиля с передними ведущими колесами (по аналогии с рассмотренным выше случаем) будет иметь вид: G1φ > Рк . Разделив обе части неравенства на силу тяжести, приходящуюся на переднюю ось, получим: φ > Рк /G1 или φ > f. Если сопоставить это выражение с неравенством (2), то можно сделать вывод, что устойчивость по сцеплению с дорогой автомобиля с передними ведущими колесами в сравнении с машиной, имеющей задние ведущие колеса, выше и не зависит от радиуса (угла) поворота. У переднеприводного автомобиля не нарушается на повороте баланс сил толкающей силы Рк и сопротивления качению Рf , как это имеет место у заднеприводного автомобиля. Заметим, что эти примеры рассмотрены без учета инерционных сил. Влияние этих сил на управляемость автомобиля будет отрицательным в обоих случаях.