

54. Визначення типу екстремуму. Матриця Гессе. Навести відповідні формули.
Узагальнення
достатньої умови існування локального
екстремуму
для функції n
змінних приводить до такого правила:
за функцією
Лагранжа виду (8.8) будується матриця
Гессе, що має блочну структуру розмірністю
 :
:
де
О – матриця розмірністю
 ,
що складається з нульових елементів,
,
що складається з нульових елементів,
Р
– матриця розмірністю
 ,
елементи якої визначаються так:
,
елементи якої визначаються так:
 ,
,
 – транспонована
матриця до Р
розмірністю
– транспонована
матриця до Р
розмірністю
 ,
,
Q
– матриця розмірністю
 виду:
виду:
 ,
де
,
де
 .
.
Розглянемо ознаки виду екстремуму розв’язку системи (8.9). Нехай стаціонарна точка має координати і .
1.
Точка
 є точкою максимуму, якщо, починаючи з
головного мінору порядку (m+1),
наступні (n–m)
головних мінорів матриці Н
утворюють знакозмінний числовий ряд,
знак першого члена якого визначається
множником
є точкою максимуму, якщо, починаючи з
головного мінору порядку (m+1),
наступні (n–m)
головних мінорів матриці Н
утворюють знакозмінний числовий ряд,
знак першого члена якого визначається
множником
 .
.
2.
Точка
є точкою мінімуму, якщо, починаючи з
головного мінору порядку (m+1),
знак наступних (n–m)
головних мінорів матриці Н
визначається множником
 .
.
55. Сідлова точка та необхідні умови її існування. Навести відповідні формули.
Для
розроблення методів розв’язування
окремих типів задач нелінійного
програмування важливе значення має
поняття сідлової точки, а також визначення
необхідних і достатніх умов існування
сідлових точок функції Лагранжа
 у (n+m)-вимірному
просторі змінних
у (n+m)-вимірному
просторі змінних
 за довільних умов, які можуть накладатися
на їх знаки (необхідні і достатні умови
існування сідлової точки функції
Лагранжа за відсутності обмежень на
знаки змінних розглянуто в п.8.4).
за довільних умов, які можуть накладатися
на їх знаки (необхідні і достатні умови
існування сідлової точки функції
Лагранжа за відсутності обмежень на
знаки змінних розглянуто в п.8.4).
Розглянемо нелінійну задачу:
 ,
,
 .
.
Причому
на компоненти векторів
 накладено обмеження на знаки. Позначимо
множину точок, що задовольняють такі
обмеження, через
накладено обмеження на знаки. Позначимо
множину точок, що задовольняють такі
обмеження, через
 .
.
Функція Лагранжа для цієї задачі має вигляд:
= .(8.12)
.(8.12)
Точка
 називається сідловою
точкою
функції Лагранжа (8.12), якщо для всіх
називається сідловою
точкою
функції Лагранжа (8.12), якщо для всіх
 виконується співвідношення:
виконується співвідношення:
 .(8.13)
.(8.13)
Для
диференційовних функцій
 та
та
 знайдемо необхідні умови існування
сідлової точки.
знайдемо необхідні умови існування
сідлової точки.
Сідлова
точка
 функції
виду (8.12) за означенням задовольняє
умову:
функції
виду (8.12) за означенням задовольняє
умову:
 .
.
Нерівність
виконується для всіх точок Х,
тобто також і для тих, у яких лише одна
координата відрізняється від Х*.
Допустимо, що це хk,
а всі інші збігаються з координатами
сідлової точки
 .
.
Оскільки
права частина нерівності є фіксованою,
а в лівій частині змінюється лише одна
координата хk,
то приходимо до функції однієї
змінної
 ,
яку можна зобразити графічно на
координатній площині.
,
яку можна зобразити графічно на
координатній площині.
Розглянемо
спочатку випадок, коли
 ,
тобто лише частину координатної площини,
для якої
.
,
тобто лише частину координатної площини,
для якої
.
Можливі такі випадки:
1)
коли всі
 ,
то максимальне значення функції L(xk)
досягатиметься в точці, для якої
,
то максимальне значення функції L(xk)
досягатиметься в точці, для якої
 (рис.8.5).
(рис.8.5).
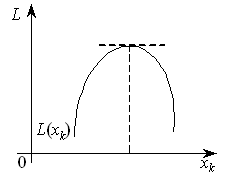
Рисунок 8.5
2)
коли максимум функції L(xk)
досягатиметься в точці
 і розглядувана частинна похідна також
дорівнюватиме нулю:
(рис.8.6).
і розглядувана частинна похідна також
дорівнюватиме нулю:
(рис.8.6).
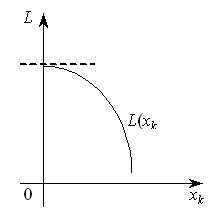
Рисунок 8.6
3)
коли
точка максимуму функції L(xk)
досягатиметься також у точці
,
а частинна похідна
 (рис.8.7).
(рис.8.7).
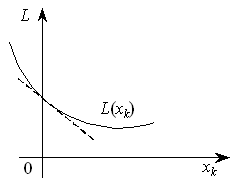
Рисунок 8.7
Узагальнюючи всі три ситуації, маємо:
 для
для
та
 .
.
Розглядаючи другу частину нерівності (8.13):

аналогічними
міркуваннями, що проілюстровані
рис.8.8-8.9, встановлюються необхідні
умови для похідних по
 функції Лагранжа в сідловій точці.
функції Лагранжа в сідловій точці.
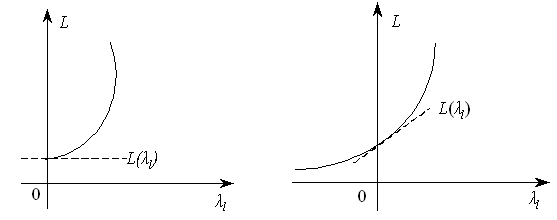
Рисунок 8.8 Рисунок 8.9
Об’єднуючи всі три випадки для невід’ємних координат, маємо необхідні умови сідлової точки:
для тих індексів j, де .(8.14)
Зауважимо,
що для
 маємо ті самі випадки, які зображено
на рис.8.5-8.9, причому графіки будуть
симетрично відображені відносно
осі Оy,
тобто для недодатних координат необхідна
умова має вигляд:
маємо ті самі випадки, які зображено
на рис.8.5-8.9, причому графіки будуть
симетрично відображені відносно
осі Оy,
тобто для недодатних координат необхідна
умова має вигляд:
 для тих індексів
j,
де
для тих індексів
j,
де
 .(8.15)
.(8.15)
І нарешті, як відомо з попереднього параграфа, якщо на знак хj умови не накладаються, то необхідною умовою є:
 ,
,
 –
довільного знака. (8.16)
–
довільного знака. (8.16)
Узагальнення всіх випадків приводить до рівняння:
 .(8.17)
.(8.17)
Розглядаючи другу частину нерівності (8.13), за допомогою аналогічних міркувань встановлюємо необхідні умови для похідних по функції Лагранжа в сідловій точці:
 для тих індексів
і,
де
для тих індексів
і,
де
 ,(8.18)
,(8.18)
 для тих індексів
і,
де
для тих індексів
і,
де
 ,(8.19)
,(8.19)
 для тих індексів
і, де
має довільний знак.(8.20)
для тих індексів
і, де
має довільний знак.(8.20)
Отже, справджується рівняння:
 .(8.21)
.(8.21)
Сукупність
співвідношень (8.14)-(8.21) становить
необхідні умови, які має задовольняти
сідлова точка
 функції Лагранжа для точок, що належать
множині
.
При
цьому
функції Лагранжа для точок, що належать
множині
.
При
цьому
 повинна мати частинні похідні по всіх
компонентах векторів
повинна мати частинні похідні по всіх
компонентах векторів
 .
.