Билет 1
1 Области применения систем видео слежения
Последние два десятилетия и в настоящее время активно исследуются вопросы обработки информации, представленной в форме изображения. Это вызвано как многообразием практических задач, где требуется обработка визуальной информации, так и все время возрастающими возможностями оптики, вычислительной техники и систем формирования изображения.
Области применения: робототехнические системы, снабженные техническим зрением, задачи, связанные с биомедецинскими исследованиями, передача изображения по узкополосным каналам связи, автоматические оптико-электронные системы, предназначенные для решения задач обнаружения объектов, слежения за этими объектами, задачи, связанные с космосом (исследование природных ресурсов).
Изображения могут формироваться как с помощью телекамер видимого диапазона, так и, например, в инфракрасном диапазоне с помощью радиолокаторов, лазерное изображение.
В настоящее время получаемые изображения могут достигать очень больших размеров (1000х1000 элементов изображения – пикселов). Чаще всего изображения, формируемые с помощью датчиков, могут поступать с частотой 25 Гц (25 раз в сек.) или 50 полукадров.
Задачи:
- восстановление и улучшение качества изображений;
- обнаружение и распознавание объектов в изображении (задача, связанная с выделением характерных признаков изображения, сегментация – разделение изображения, анализ);
- слежение и сопровождение объектов.
Функциональная схема системы видеослежения

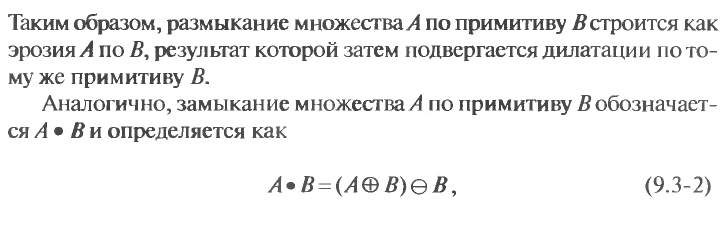
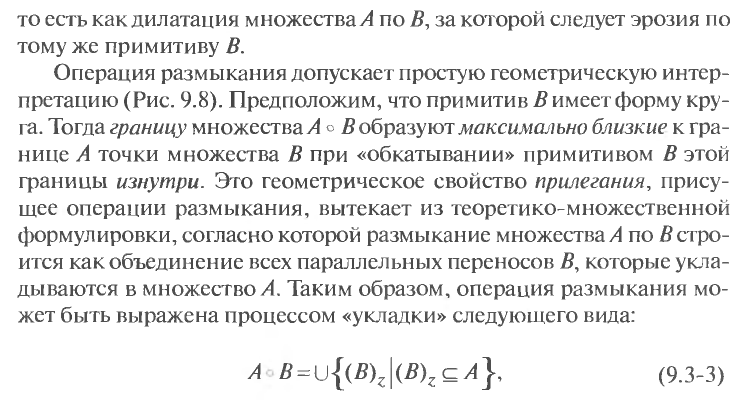
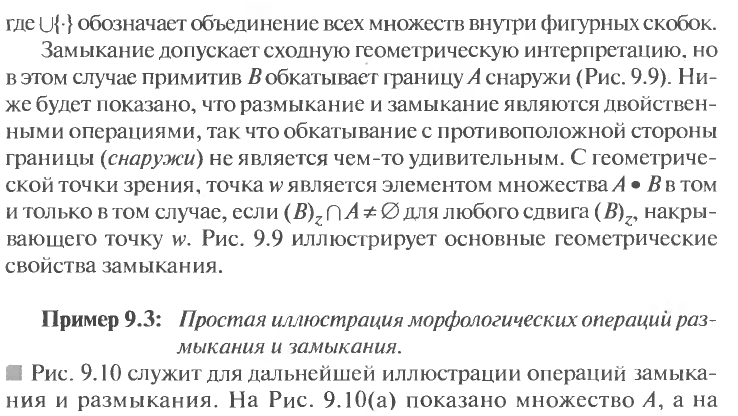
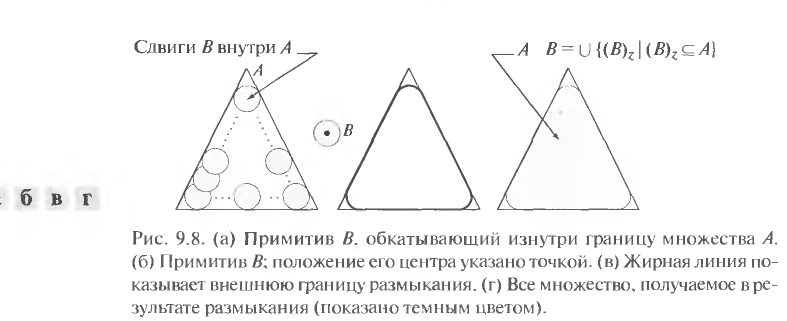
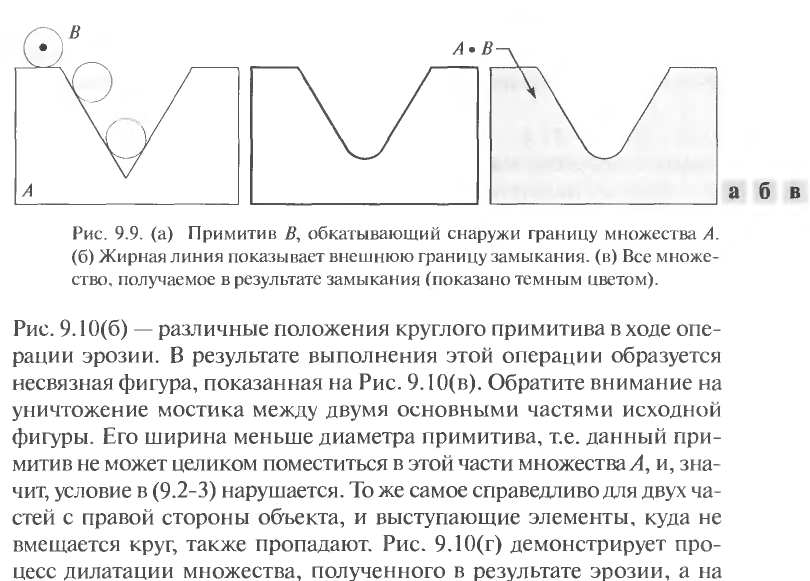
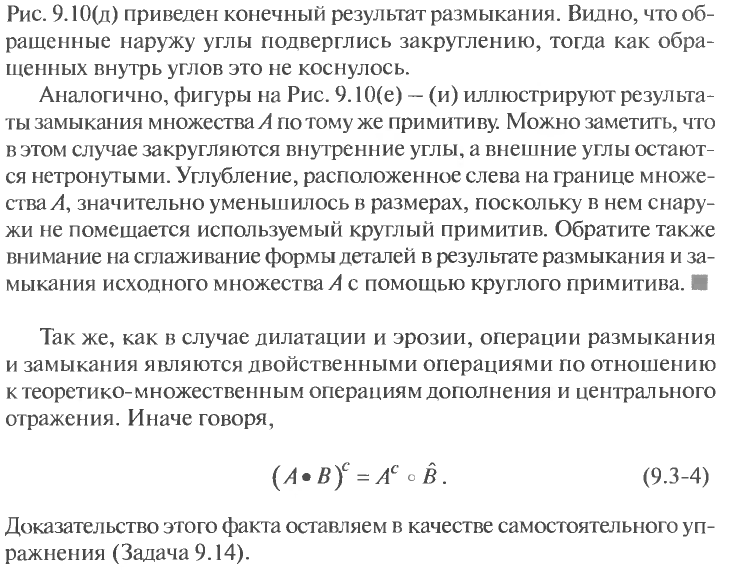
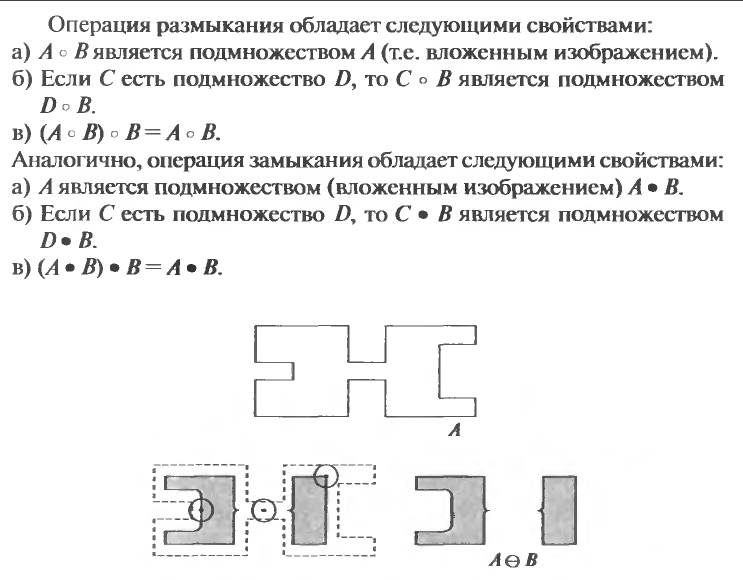
2 Операции замыкания/ размыкания



Билет 2
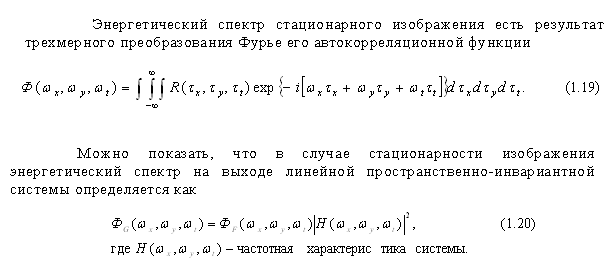
1 Детерминированное описание непрерывных изображений
Распределение энергии источника светового излучения по пространственным координатам x, y, времени t и длинам волн λ описывается функцией С(x, y,t ,λ), причем 0 С(x, y,t ,λ) A.
Размеры изображения ограничены формирующей системой и средой, на которую оно записывается, т.е.
-Lx x Lx , -Ly y Ly , -T t T
 Ощущение
светлоты, возникающее в зрительной
системе человека, обычно определяется
мгновенной яркостью светового поля
Ощущение
светлоты, возникающее в зрительной
системе человека, обычно определяется
мгновенной яркостью светового поля
где Vs(λ) – спектральная чувствительность человеческого зрения.
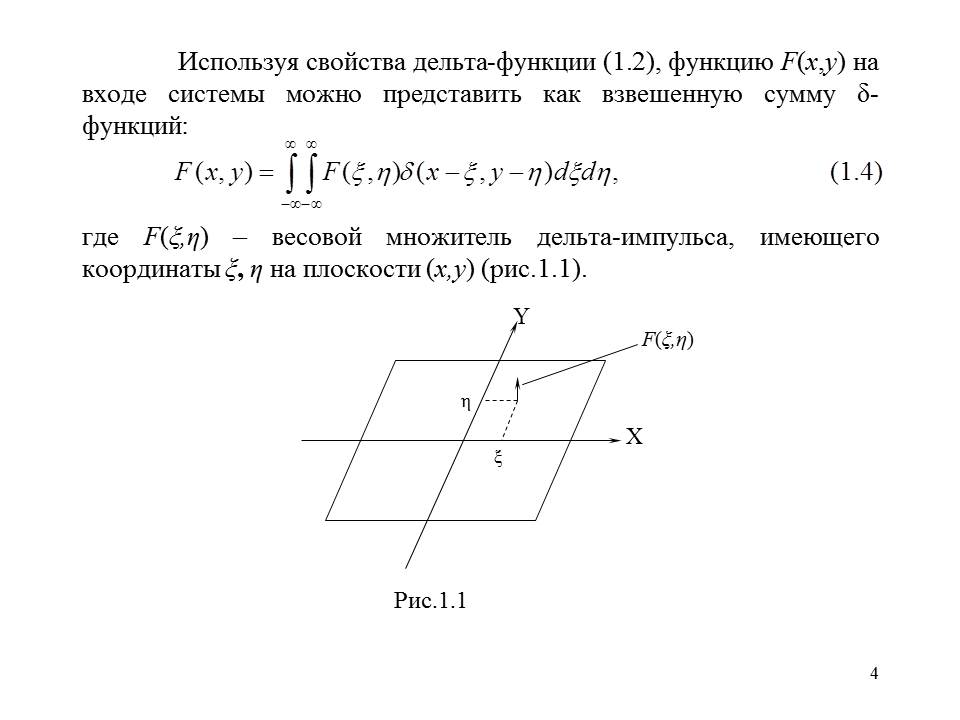
Д вумерная
дельта-функция Дирака есть сингулярный
оператор,
обладающий следующими свойствами:
вумерная
дельта-функция Дирака есть сингулярный
оператор,
обладающий следующими свойствами:
Д вумерная
система называется линейной, если для
нее справедлив принцип суперпозиции:
вумерная
система называется линейной, если для
нее справедлив принцип суперпозиции:
где Q – линейный оператор; a1 и a2 – постоянные коэффициенты.


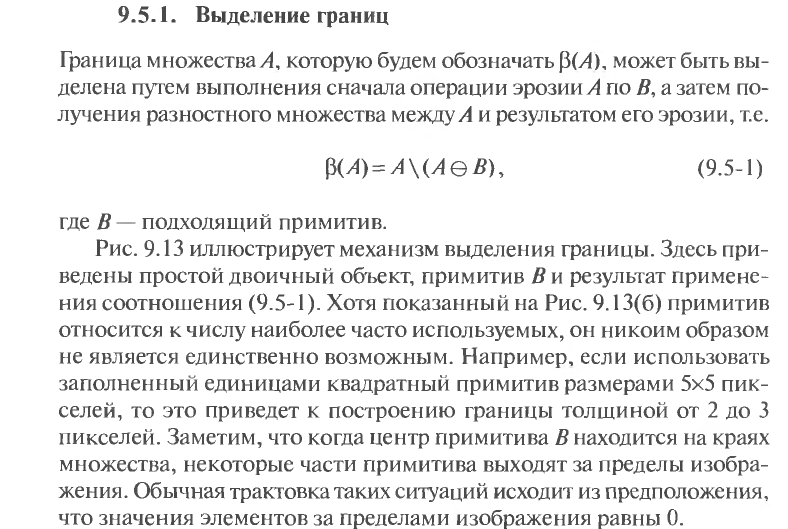
2 Выделение границ


Билет 3
1 Вероятностное описание непрерывных изображений
Огромное число изображений часто трудно описать детерминированными функциями. Поэтому широко используется вероятностное описание, то есть изображение рассматривается как реализация двумерного случайного процесса.

Сама яркость изображения не является отрицательной. Поэтому используются другие способы описания, например, экспоненциальное распределение:
![]()

Числитель – совместная плотность распределения, знаменатель – безусловная.

Автокорреляционная функция отражает степень статистической связи между различными значениями функциями.
Автоковариационная функция (процессы центрированы) изображения определяется как:
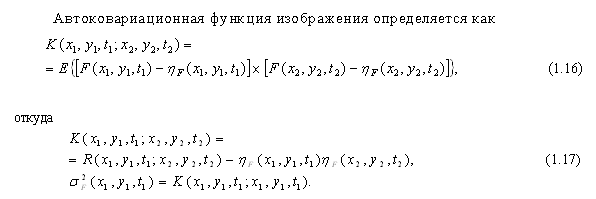
Для стационарного процесса в широком смысле средняя яркость является постоянной, а автокорреляционная функция зависит только от разности координат:
![]()