

Цифровое вычислительное устройство и его передаточная функция.
ЦВУ можно рассматривать как дискретный преобразователь, преобразующий входную последовательность чисел хц(k) в выходную yц(k) в соответствии с заложенной программой вычислений, представляющей собой алгоритм переработки информации. В дискретной линейной системе связь между входом и выходом (входной и выходной дискретными последовательностями значений сигнала – отсчетами), задается линейным оператором преобразования TL:
y(kt) = TL{x(kt)}.
Это выражение отображает краткую запись линейного разностного уравнения:
![]() am
y(kt-mt)
=
am
y(kt-mt)
=![]() bn
x(kt-nt),
(6.2.8)
bn
x(kt-nt),
(6.2.8)
где am и bn - вещественные или, в общем случае, комплексные коэффициенты. Выполним нормировку уравнения (6.2.8) к a0 = 1, и, принимая в дальнейшем t = 1, приведем его к виду:
y(k) =
bn
x(k-n)
–![]() am
y(k-m).
(6.2.9)
am
y(k-m).
(6.2.9)
Рис. 6.2.2. Рекурсивный
ЦФ.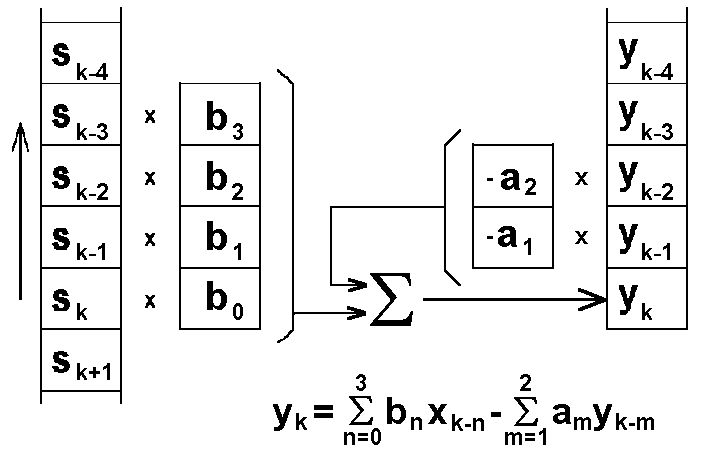
Передаточные функции ЦВУ. Удобным методом решения разностных уравнений линейных систем является z-преобразование. Применяя z-преобразование к обеим частям равенства (6.2.8), c учетом сдвига функций (y(k-m) z-m Y(z)), получаем:
Y(z) amz-m = X(z) bnz-n, (6.2.10)
где X(z),Y(z)- соответствующие z-образы входного и выходного сигнала. Отсюда, полагая ao = 1, получаем в общей форме функцию связи выхода фильтра с его входом - уравнение передаточной функции системы в z-области:
H(z) = Y(z)/X(z)
=
bnz-n![]() (1+
amz-m).
(6.2.11)
(1+
amz-m).
(6.2.11)
Для нерекурсивных ЦВУ, при нулевых коэффициентах am:
H(z) = bnz-n. (6.2.12)
При проектировании фильтров исходной, как правило, является частотная передаточная функция фильтра H(ω), по которой вычисляется ее Z-образ H(z) и обратным переходом в пространство сигналов определяется алгоритм обработки данных. В общей форме для выходных сигналов фильтра:
Y(z) = H(z)·X(z).
Y(z)·(1+![]() am
z-m)
= X(z)
am
z-m)
= X(z)![]() bn
z-n
bn
z-n
Y(z) = X(z) bn z-n – Y(z) am z-m. (6.2.13)
После обратного Z-преобразования выражения (6.2.13):
y(k)
=![]() bn
x(k-n)
–
am
y(k-m).
(6.2.14)
bn
x(k-n)
–
am
y(k-m).
(6.2.14)
При подаче на вход фильтра единичного импульса Кронекера о, имеющего z-образ (z)=z-n = 1, сигнал на выходе фильтра будет представлять собой импульсную реакцию фильтра y(k) ≡ h(k), при этом:
H(z) = Y(z)/(z)
= Y(z) = TZ[y(k)] =![]() h(k)
z-k,
(6.2.15)
h(k)
z-k,
(6.2.15)
т.е. передаточная функция фильтра является z-образом ее импульсной реакции. При обратном z-преобразовании передаточной функции соответственно получаем импульсную характеристику фильтра:
h(k) H(z). (6.2.16)
Если функция H(z) представлена конечным степенным полиномом, то обратное z-преобразование осуществляется элементарно идентификацией коэффициентов по степеням z. Передаточная функция также может быть представлена степенным полиномом прямым делением числителя на знаменатель правой части выражения (6.2.11), однако результат при этом может оказаться как конечным, так и бесконечным, т.е. система может иметь либо конечную, либо бесконечную импульсную характеристику. Практически используемые рекурсивные фильтры обычно имеют бесконечную импульсную характеристику (БИХ-фильтры) при конечном числе членов алгоритма фильтрации (6.2.14).
Система устойчива, если при любых начальных условиях ее реакция на любое ограниченное воздействие также ограничена. Критерием устойчивости является абсолютная сходимость отсчетов импульсного отклика системы:
![]() |h(n)|
< .
(6.2.17)
|h(n)|
< .
(6.2.17)
Анализ устойчивости может быть проведен по передаточной функции. В устойчивой системе передаточная функция не должна иметь особых точек (полюсов) на и вне единичного круга на z-плоскости. Отсюда необходимое и достаточное условие устойчивости импульсных систем - модули корней передаточной функции (6.2.11) должны быть меньше 1 (полюса передаточной функции системы внутри единичного круга на z-плоскости). Чем меньше значения модулей корней, тем больше запас устойчивости системы.
СОВРЕМЕННЫЕ ПОДХОДЫ К УПРАВЛЕНИЮ ПРЕДПРИЯТИЯМИ