

Параметрические и непараметрические модели оу. Расчет динамических свойств оу статистическими методами.
Идентификация объекта, в общих словах, это построение математической модели объекта для его теоретического исследования либо для применения в качестве эталона процесса в реальной САУ. Математические модели, равно как и виды индетификации, бывают: параметрическими, непараметрическими, рекуррентными.
Параметрические модели связаны с четким аналитическим построением зависимостей выходных сигналов ОУ от сигналов, подводимых на его входы.
Динамические характеристики (переходная характеристика, частотная переходная функция и др.) характеризуют протекание временных процессов в ОУ и по их виду можно судить о времени протекания переходного процесса и других показателях качества. Во многих случаях ОУ можно рассматривать как систему динамических звеньев или (в вырожденном случае) как динамическое звено. Зная динамические характеристики динамических звеньев, входящих в ОУ, можно получить динамические характеристики самого ОУ.
Поведение ОУ в динамике часто описывается нелинейными ДУ.
В ТАУ применяют несколко способов составления уравнений динамики ОУ. Первый способ – когда дифференциальные или разностные уравнения составляются аналитически на основе анализа физических процессов, которые могут происходить в ОУ; второй – с помощью экспериментально определенных статических характеристик, представленных в виде графиков; третий – по данным таблиц, полученных также экспериментальным путем, с последующей их обработкой методами регрессионного анализа; четвертый способ – основан на использовании аналогового или цифрового моделирования.
При использовании статических характеристик для составления уравнений ОУ применяется метод линеаризации, сущность которого заключается в замене нелинейной составляющей линейной в некотором диапазоне изменения переменных. Такая замена в случае достаточно гладких нелинейностей практически возможна во всем рабочем диапазоне изменения переменных.
Реализация процедур и методов оценки параметров моделей оу.
На практике часто применяется интегральная оценка параметров ОУ.
На ОУ в процессе его функционирования действуют возмущения, различные по величине и физической природе. Для учета лидирующих возмущений возможно применение принципа регулирования по возмущению.
В соответствии с этим принципом в зависимости от величины возмущения УВМ может вносить коррекцию в математическую модель процесса, сокращая тем самым методическую ошибку системы. Учет всех возмущений, действующих на ОУ данным методом невозможен из-за бесконечного количества каналов данных возмущений. Поэтому на практике рекомендуется интегральная оценка физического процесса совместно с возмущениями и помехами в КС исходя из теоремы Котельникова. Теорема гласит, что любая функция времени S(t), обладающая ограниченным спектром W может быть представлена в виде бесконечной суммы, члены которой представляют собой произведение:
 .
.
Величины
 представляют значения исходной функции
времени S(t),
определенной в дискретные моменты
времени K/2W.
Эти величины называются отсчетами или
отсчетными значениями функции S(t).
Дробный множитель:
представляют значения исходной функции
времени S(t),
определенной в дискретные моменты
времени K/2W.
Эти величины называются отсчетами или
отсчетными значениями функции S(t).
Дробный множитель:
называется
функцией отсчетов. При
 функция отсчетов принимает вид (см.
рис.1).
функция отсчетов принимает вид (см.
рис.1).
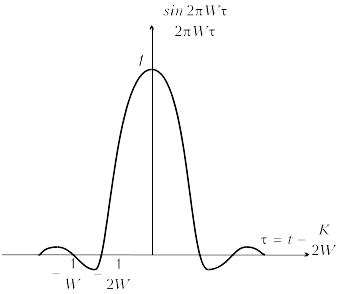
Рис.1
Основные свойства функции отсчетов:
1. В момент времени t=k/2W функция отсчетов достигает max=1.
2.
В момент времени
 функция отсчетов обращается в нуль.
функция отсчетов обращается в нуль.
Ширина главного лепестка функции отсчетов на нулевом уровне равна:
 .
.
Отсюда следует, что min длительность импульса, который может существовать на выходе селективной системы с полосой W, равна 1/W.
4. Функции отсчетов ортогональны на бесконечно большом интервале времени.