

Возмущения в системах управления, их основные характеристики.
В любом ОУ существует определённая функциональная зависимость выходных величин объекта от управляющих и возмущающих воздействий. Основная задача управления объектом состоит в том, что, исходя из целей управления и его физической природы, необходимо как можно точнее определить оператор (или алгоритм) управления объектом и синтезировать устройство управления для реализации этих целей.
ОУ имеют несколько параметров:
Неконтролируемые F( f1, f1) – возмущения.
Входные X( x1,x1, …) – управляемые воздействия.
Выходные Y(y1, y1,, … )
F

X Y
ОУ представляет собой сложную структуру со взаимосвязанными параметрами.
Возмущения – параметры, которые отражают реакцию окружающей среды на ОУ и бывают: а) координатными; б) параметрическими;
Координатные возмущения – параметры, которые влияют на регулируемую величину непосредственно алгебраическим суммированием.
Параметрические возмущения – параметры, которые влияют на регулируемую величину косвенно, через параметры ОУ.
На
рис.2.е-к показаны
наиболее часто встречающиеся сигналы
возмущающих
воздействий
 .
.
В ряде случаев в качестве типового
возмущения выступает периодически
повторяющаяся ступенчатая функция с
максимальным (или минимальным) значением
ряде случаев в качестве типового
возмущения выступает периодически
повторяющаяся ступенчатая функция с
максимальным (или минимальным) значением
 рис.2.и,
или синусоидальная функция рис.2.к:
рис.2.и,
или синусоидальная функция рис.2.к:
Рисунок 2 – Управляющие сигналы и возмущающие воздействия
Существуют ОУ (антенна радиолокатора, летательный аппарат и т.д.), когда на их вход наряду с регулярным воздействием поступает сигнал в виде флуктуаций, представляющих собой случайные функции от времени, т.е. такие функции, значения которых при каждом данном аргументе являются случайной величиной. Сигнал этого типа относится к случайным воздействиям и может быть представлен в виде, изображённом на рис.2.л Уровень случайной функции может изменяться в широких пределах.
Статические, динамические и частотные характеристики оу.
Статические характеристики описывают состояние ОУ в стаическом режиме, когда все переходные процессы завершены. Тогда управляющее воздействие на ОУ, как функция зависящяя от времени t, может быть записано следующим образом:
 ,
,
где наиболее часто I – это функция времени, описывающая возмущающее воздействие F(t) на ОУ или величину отклонения Y(t)-X(t) выхода Y(t) системы управления от входа регулятора X(t) системы управления (см. рисунки 2 и 3).

Рисунок 2 – Управление по возмущению

Рисунок 3 – Управление по отклонению
Динамические характеристики (переходная характеристика, частотная переходная функция и др.) характеризуют протекание временных процессов в ОУ, и по их виду можно судить о времени протекания переходного процесса и других показателях качества. Тогда управляющее воздействие на ОУ может быть записано следующим образом::

Несмотря на разнообразие динамических свойств промышленных объектов, можно указать на некоторые специфические особенности, присущие большинству из них:
1. Временные характеристики промышленных управляемых объектов относительно управляющего воздействия обычно представляют собой монотонные функции времени типа, указанного на рис.4:
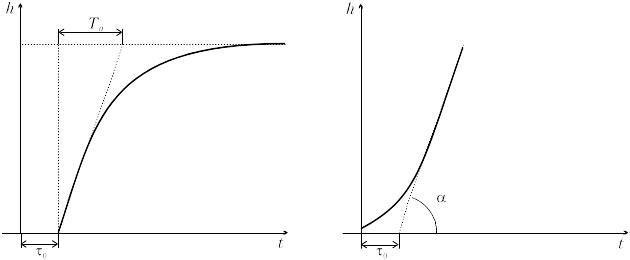
а) б)
Рис.4
2. Амплитудно-частотные характеристики объектов представляют собой монотонно убывающие с ростом частоты функции. Для объектов с самовыравниванием при w=0 значение этих характеристик равно установившемуся отклонению временной характеристики (рис.5.а).

а) б)
Рис.5
3. Амплитудно-фазовые характеристики объектов с самовыравниванием и без самовыравнивания имеют вид, показанный соответственно на рис.6.а и рис.6.б.

а) б)
Рис.5