2. Последовательно-параллельное соединение (Изодромное звено)
 –
ДУ;
–
ДУ;

 – ПФ.
– ПФ.
Регулируя KP, TИЗ, можно регулировать динамические характеристики системы регулирования, а в целом - показатели качества. Причем, во втором случае имеем связанное регулирование, то есть воздействие на КР влияет на ТИЗ.
ПД-регулятор

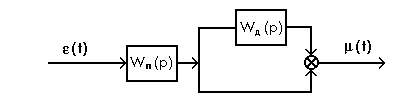
1. Параллельное соединение
 –
ДУ;
–
ДУ;

 –
ПФ.
–
ПФ.
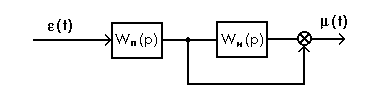
2. Последовательно-Параллельное соединение
U(t) = U0 + Kp ( (t) + Tпр d (t) / dt ) - ДУ.
WПД(p) = K p ( 1+Tпр p) - ПД.
W ПД
(j)
= Kp
( 1+Tпр
j
) = Kp+
jTпрKp
ПД
(j)
= Kp
( 1+Tпр
j
) = Kp+
jTпрKp
ПИД-регулятор

Комплексное использование трех составляющих законов регулирования в одном регуляторе позволяет в значительной степени повысить показатели качества регулирования в системе управления и, кроме того, позволяет использовать прикладные пакеты программ, наработанных пользователями.
 - ДУ.
- ДУ.
С труктурная
схема такого регулятора будет представлять
собой последовательно-параллельное
соединение идеальных законов регулирования
труктурная
схема такого регулятора будет представлять
собой последовательно-параллельное
соединение идеальных законов регулирования
 -
ПФ.
-
ПФ.
Разновидности структур регуляторов. Реализация регуляторов для статических и астатических объектов управления (ОУ). Передаточные функции цифровых регуляторов с линейными законами.
Запишем ПФ системы регулирования по управляющему или возмущающему воздействию с учетом ПФ регулятора:


Написанные выражения позволяют определить характер системы регулирования в плане ее статизма или астатизма. Объект, регулятор могут быть статическими и астатическими. Варьируя параметрами системы стараются построить астатическую систему, но для нее характерно пониженное быстродействие (статический объект и астатический регулятор - астатическая система; астатический объект и статический регулятор - статическая система).
ПФ системы по возмущающему воздействию со стороны регулятора:


Из этого следует, что параметры регулятора имеют решающее воздействие на динамические характеристики системы в целом.
Параллельное и параллельно-последовательное соединение составляющих гибридных законов управления в ар
ПИ - регуляторы
Комплексно используют лучшие качества каждой из составляющих законов регулирования. На практике встречаются два вида включения составляющих ПИ- регулятора.
1. Параллельное соединение


2. Последовательное соединение

Регулируя KPTиз, можно регулировать динамические характеристики системы регулирования, а в целом – показатели качества. Причем во втором случае имеем связанное регулирование, то есть воздействие на Кр влияет на Тиз.
ПД - регуляторы
1. Параллельное соединение

WПД=Kp+TДp

2. Последовательное соединение
WПД=Kp(1+TДp)
WПД(j)=Kp(1+TДj)=Kp+jTДKp
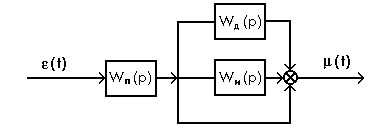
ПИД - регуляторы
Комплексное использование трех составляющих законов регулирования в одном регуляторе позволяет в значительной степени повысить показатели качества регулирования в системе управления и, кроме того позволяет использовать прикладные пакеты программ, наработанных пользователями.

Структурная схема такого регулятора будет представлять собой последовательно-параллельное соединение идеальных законов регулирования: