

Трехпозиционные ар
Трехпозиционные регуляторы отличаются от двухпозиционных формой статической характеристики и количеством уровней энергии, подводимой к объекту регулирования. Статические характеристики трехпозиционных регуляторов всегда имеют зону нечувствительности, а зона неоднозначности может и отсутствовать. Вид этих характеристик показан на рисунке:

В первом случае статическая характеристика АР описывается уравнением:


Во втором случае:

Процесс формирования регулирующих воздействий в регуляторе с зоной нечувствительности показан на рисунке.
Трехпозиционные регуляторы обеспечивают меньший уровень колебаний регулируемого параметра, а при выборе промежуточного состояния регулирующего воздействия mСР, близкого к номинальному значению, для заданного уровня регулирования можно удерживать регулируемую величину в пределах зоны нечувствительности.

Параметрами настройки трехпозиционных регуляторов служат ширина зоны нечувствительности, величина промежуточного значения регулирующего воздействия и уровни min и max.
Регуляторы с линейными законами регулирования
В зависимости от значения коэффициента передачи и постоянных времени можно получить различные типы линейных регуляторов: пропорциональный (П), интегральный (И), пропорционально-интегральный (ПИ), пропорционально-дифференциальный (ПД), пропорционально-дифференциальный (ПИД).
Передаточные функции |
Дифференциальные уравнения |
Тип регуля-тора |
|
|
П |
|
|
И |
|
|
ПИ |
|
|
ПД |
|
|
ПИД
|





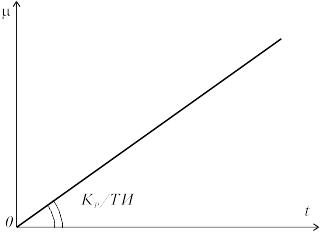
П-регулятор

(t)=0+KP(t),
где 0 - начальное значение регулирующего воздействия.
В большинстве случаев принимают 0=0.
 ;
;

 .
.
Из графика видно, что C1<C при KP>1, C2>C при KP<1. Из построения АФЧХ видно, что варьируя значение KP можно в значительной степени изменять динамические характеристики системы регулирования.
Для каждой системы регулирования существует оптимальное значение KP. Более предпочтительным всегда является быстродействие системы. С целью достижения заданных критериев устойчивости систему регулирования необходимо снабжать определенным количеством корректирующих звеньев.
80-90% от всего закона регулирования приходится на П-закон (и, соответственно, на П - регулятор). Из промышленных агрегатных комплексов наиболее распространены: "Каскад", "Контур" (Р25), АКЭСР, АКЭСР-2.
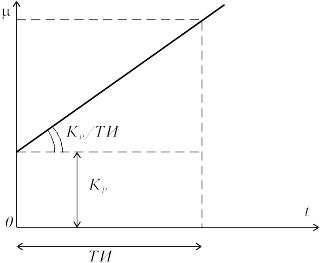
И-регулятор
 dt
.
dt
.
Н айдем
ПФ такого регулятора по ошибке (рис. 2).
айдем
ПФ такого регулятора по ошибке (рис. 2).

Среди показателей качества системы основным почти всегда является точность системы.
Так как на практике реальный регулятор имеет конечное значение коэффициента передачи и априорное значение постоянных времени, то ПФ И-регуляторов в общем случае можно записать в следующем виде:
 .
.
Недостатком И-регулятора является снижение запаса устойчивости и снижение быстродействия. Основное достоинство- астатизм, то есть снижение уровня ошибки, в пределе до нуля, а на практике до наперед заданного значения.
Промышленные И-регуляторы в чистом виде почти не выпускаются, как правило, они являются частью универсальных (например, ПИ-регуляторы).
ПИ-регулятор
ПИ- регуляторы комплексно используют лучшие качества каждой из составляющих законов регулирования. На практике встречаются два вида включения составляющих ПИ- регулятора.
1. Параллельное соединение

 – ДУ.
– ДУ.
 –
ПФ.
–
ПФ.