

Y
Системы программного управления (СПУ). Классификация СПУ. 2
Структурные схемы СПУ. 3
Реализация СПУ. 4
Системы позиционного и контурного программного регулирования. 4
Классификация объектов управления (ОУ): линейные ОУ, нелинейные ОУ, линеаризованные ОУ; ОУ с постоянными, переменными и распределенными параметрами; аналоговые и дискретные ОУ. 5
Возмущения в системах управления, их основные характеристики. 6
Статические, динамические и частотные характеристики ОУ. 8
Понятие модели ОУ. Понятие идентификации модели ОУ. Задачи и методы идентификации. 10
Экспериментальные исследования ОУ и обработка результатов экспериментов. Построение статических моделей ОУ методом пассивного эксперимента. Построение статических моделей ОУ методом активного эксперимента. 11
Параметрические и непараметрические модели ОУ. Расчет динамических свойств ОУ статистическими методами. 12
Реализация процедур и методов оценки параметров моделей ОУ. 13
Измерительные и исполнительные средства. Государственная система приборов и средств автоматизации (ГСП), ее основные характеристики 15
Системотехнические принципы построения ГСП 16
Структура ГСП 17
Унификация сигналов в ГСП 17
Исполнительные устройства, их основные типы и характеристики. Согласование измерительных и исполнительных устройств с управляющим контроллером 18
Интерфейсы КСУ. Назначение интерфейсов. 19
Классификация интерфейсов 19
Интерфейсы RS-232, RS-485, RS-422, RS-423, Modbus, Profi-bus, Ethernet, их основные характеристики и принципы работы. Структуры и схемные решения интерфейсов. Использование интерфейсов. 19
RS-485 19
Общая характеристика УАПП 20
RS-232 21
RS-422,423 21
Modbus, Profibus 22
Ethernet 23
Сетевые технологии в системах управления. Сетевые возможности контролеров, которые свободно программируются. Устройства и протоколы обмена информацией в АСУ ТП на нижнем и среднем уровнях. 23
Регуляторы. Назначение автоматических регуляторов. Обобщенная структурная схема автоматических регуляторов 25
Классификация регуляторов 26
Регуляторы с типовыми законами регулирования 27
Аналоговые и цифровые регуляторы 28
Релейные регуляторы. Динамика процессов регулирования в системах с двухпозиционным и трехпозиционным регулирова-нием 29
Двухпозиционные АР 29
Трехпозиционные АР 30
Регуляторы с линейными законами регулирования 32
П-регулятор 32
И-регулятор 33
ПИ-регулятор 34
ПД-регулятор 35
ПИД-регулятор 36
Разновидности структур регуляторов. Реализация регуляторов для статических и астатических объектов управления (ОУ). Передаточные функции цифровых регуляторов с линейными законами. 37
Параллельное и параллельно-последовательное соединение составляющих гибридных законов управления в АР 38
ПИ - регуляторы 38
ПД - регуляторы 38
ПИД - регуляторы 39
Импульсные регуляторы 40
АР 41
Классификация АР 42
РПС 43
Системы программного управления (спу). Классификация спу.
К СПУ относятся такие системы, в которых управляющее воздействие изменяется во времени по заданному закону - программе. Основными составными частями любой СПУ являются: программное устройство, система воспроизведения программы, объект управления и внешняя среда. По виду представления программы все СПУ делятся на аналоговые и дискретные.
В аналоговых СПУ информация представляет непрерывную функцию времени, что обеспечивает непрерывное воздействие на объект.
В дискретных СПУ информация записывается в виде ряда дискретных точек, а требуемые промежуточные значения формируются с помощью интерполяторов
По внутренней структуре или алгоритму управления все СПУ делятся на замкнутые (с обратной связью) и разомкнутые (без обратной связи). Все замкнутые СПУ имеют такую же структуру как и обыкновенные СУ (аналоговые и дискретные), т.е. имеется датчик обратной связи и элемент сравнения,в котором происходит процесс выработки управляющего воздействия на объект путем сравнения информации, полученной с программоносителя, с информацией, поступающей по цепи обратной связи.
Структурные схемы спу.
Обобщенная логическая структура системы программного управления приведена на рис1.

В состав системы преобразования и ввода информации с датчиков входят: аналоговый мультиплексор (АМUХ) преобразователь аналог-цифра (АDС), мультиплексор цифровых сигналов (МUХ), набор регистров (RG), устройство управления (CU). К общей шине подключается через устройство программируемого интерфейса (PIU), такие как КР580ВВ55 или контроллер ПДП, INTU- контроллер прерываний.
Обычно объект управления через аналоговые датчики (AD), ADC, DAC и исполнительные механизмы (М) образует с микропроцессором замкнутую систему управления, в которой погрешности преобразований систем ввода и вывода при нахождении в допустимых пределах могут не вносить существенного вклада в точность операций, так как система является следящей и независимо от них приходит в устойчивое состояние (рис.4).
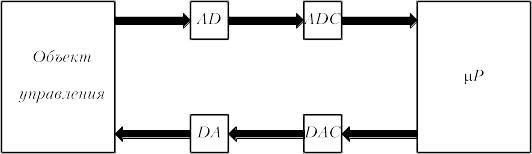
Рис.4.
При входе погрешностей за допустимые пределы может наблюдаться самовозбуждение системы, при котором она выходит из состояния устойчивого равновесия.
Реализация спу.
Подавляющее большинство СПУ выполняются на основе микропроцессоров (микро-, миниЭВМ или программируемых контроллерах), позволяющих программными методами и специальными техническими средствами реализовать управление станками и другим технологическим оборудованием.
Все многообразие систем ЧПУ разделяется на две большие группы.
К первой относятся устройства с постоянной структурой (NC - numerical control), имеющие схемную реализацию алгоритмов работы (интерполяции,типовых циклов и т.д.). Их выпускают с начала освоения ЧПУ для различных групп станков: токарных, фрезерных, шлифовальных и др.
Ко второй группе (CNC - computer numerical control) относятся овременные устройства с программной реализацией большинства алгоритмов управления. Эти алгоритмы в виде программы записываются в ПЗУ или ППЗУ (аналогично записи алгоритмов в Р-130). Все управление осуществляется от микропроцессорной системы или микроЭВМ. Это дает возможность гибко и оперативно формировать типовые циклы обработки применительно к различным технологическим задачам.
В зависимости от исполнения и назначения АСУТП состав системных программ может сильно изменяться. Так, например, в цеховых АСУТП могут вообще отсутствовать трансляторы, компоновщики рабочих программ и прочие сервисные средства, не используемые при обычной эксплуатации отлаженных систем.