

10.4.1 Точность способа
Радиальная средняя квадратическая погрешность места судна может быть рассчитана по формуле
![]()
В соответствии с известными формулами, имеем

Тогда
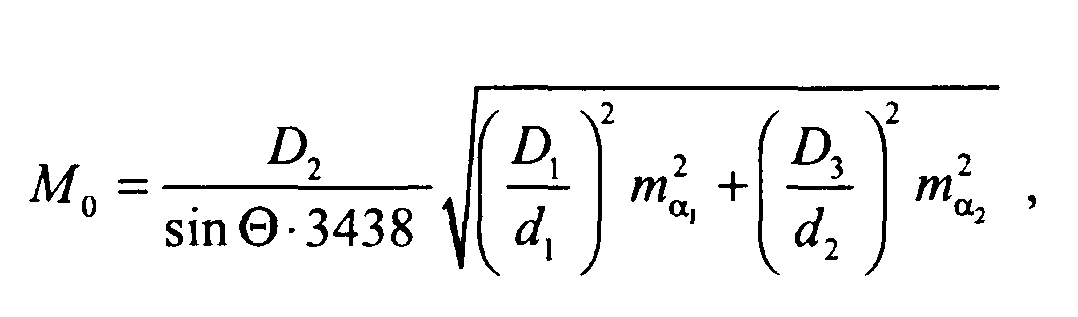
где Θ — угол пересечения линий положения.
В большинстве случаев
тα1 = тα2 = тα, а Θ = 360° — (α1 + α2 +β).
Отсюда
 (10.3)
(10.3)
Из анализа формулы (10.3) следует, что для повышения точности обсервации необходимо выбирать ориентиры, имеющие большие базовые расстояния d1 и d2, как можно меньшие расстояния D1 , D2 и D3 от судна, а также повышать точность измерения горизонтальных углов.
СКП обсервации по горизонтальным углам в средних условиях (D = 8 - 10 миль, d = 3 - 5 миль, Θ = 45°) оценивается величиной
MO = 0,1 ÷ 0,3 кбт.
10.4.2 Уточнение поправки компаса
После выполнения обсервации по двум горизонтальным углам следует уточнить значение поправки компаса. Для этого:
из обсервованного места снимают направления на ориентиры и принимают их за истинные пеленги;
рассчитывают значения трех поправок компаса
К1 = ИП1 – КП1;
К2 = ИП2 – КП2;
К3 = ИП3 – КП3;
усредняют полученные величины и принимают результат как уточненное значение поправки компаса
К =(К1 + К2 + К3 ) / 3.
10.5 Определение места судна по разновременным линиям положения
В практике судовождения бывают случаи, когда необходимо уточнить координаты места судна, а имеется возможность измерить только один навигационный параметр. В этом случае необходимо выполнить определение места судна по разновременным линиям положения.
Особенность разновременных наблюдений на ходу судна заключается в том, что измерения навигационных параметров производятся из разных мест. Возникает необходимость приведения результатов измерения к одному месту (зениту).
После выполнения этой операции навигационные параметры и соответствующие им навигационные изолинии (линии положения) называются приведенными. В пересечении приведенных изолиний или линий положения находится обсервованное место судна на момент обсервации Т0, к которому приведены все измерения. В качестве Т0 принимают обычно момент последнего измерения.
Приведение к одному месту (зениту) заключается в учете перемещения судна за промежуток времени между моментом измерения i-го параметра Тi и моментом Т0. Приведение может быть выполнено аналитически или графически.
Графическое приведение состоит в том, что каждую точку приводимой навигационной изолинии смещают по направлению движения судна на величину плавания судна между моментами времени Тi и Т0.
Величина плавания определяется методом счисления. Место судна называется счислимо-обсервованным.
10.5.1 Точность счислимо-обсервованного места
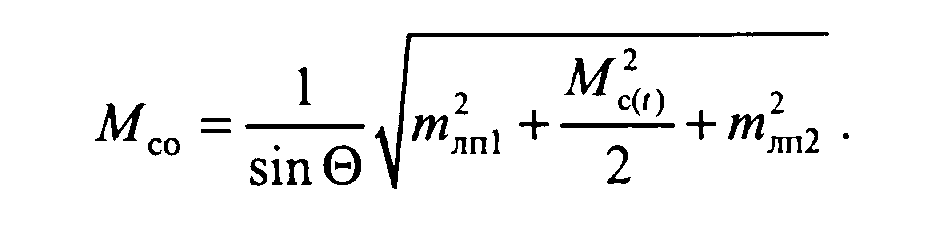
Общая формула для оценки точности счислимо-обсервованного места по двум линиям положения имеет вид
![]()
где mЛП1(ПР) — СКП первой приведенной линии положения;
mЛП2 — СКП второй линии положения;
Θ = 2 - 1 — разность направлений градиентов второго и первого измеренных навигационных параметров.
Погрешность приведенной линии положения обусловлена погрешностью измерений навигационного параметра и погрешностью счисления за время плавания t = Т0 – Тi
 (10.4)
(10.4)
где MC(t) – погрешность счисления за время плавания t = Т0 – Тi.
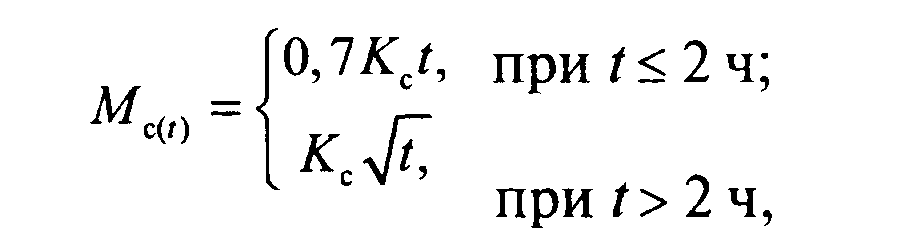
где КC — коэффициент счисления, зависящий от условий плавания;
t — промежуток времени между моментами измерения навигационных параметров.