

12.4. Радионавигационные системы на основе исз
Определение координат с помощью ИСЗ основано на измерении доплеровского смещения при пролете над местом наблюдения (рис.12.2).
При пролете над местом наблюдения доплеровская частота меняет знак с положительной на отрицательную. Траектории спутников известны на много месяцев вперёд и выпускаются в виде таблиц. Каждый из спутников имеет свою рабочую частоту и характерный тип сигнала
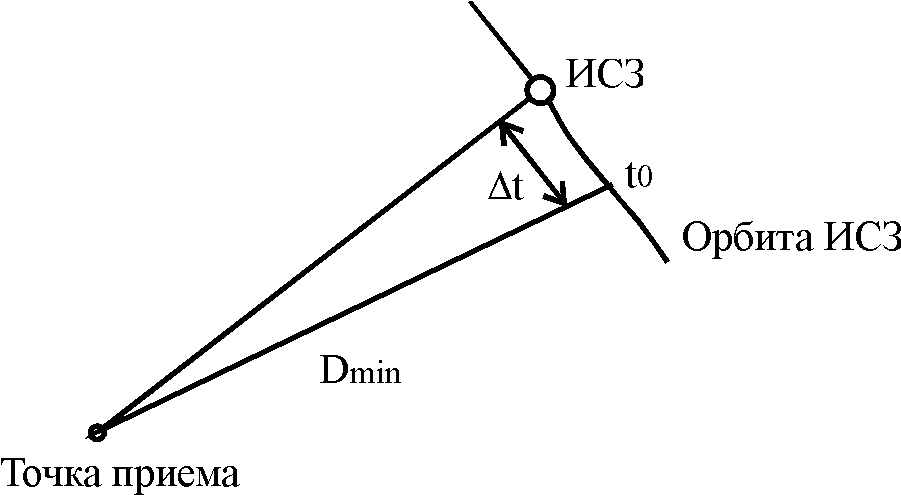
Рис. 12.2. Схема измерения доплеровского смещения при полете спутника
.
При пролёте исз доплеровское смещение будет:

Координаты на геоиде фиксируются по прохождению fD=0 или по смене знака доплеровского смещения..
Другим методом определения координат на геоиде (условной средней поверхности Земли, отличающейся от сферической), является метод, основанный на определения направлений на спутники, расположенные на геостационарных орбитах (рис. 12.3). Каждый из спутников ведет телевизионное вещание и положение спутников известно с большой точностью.
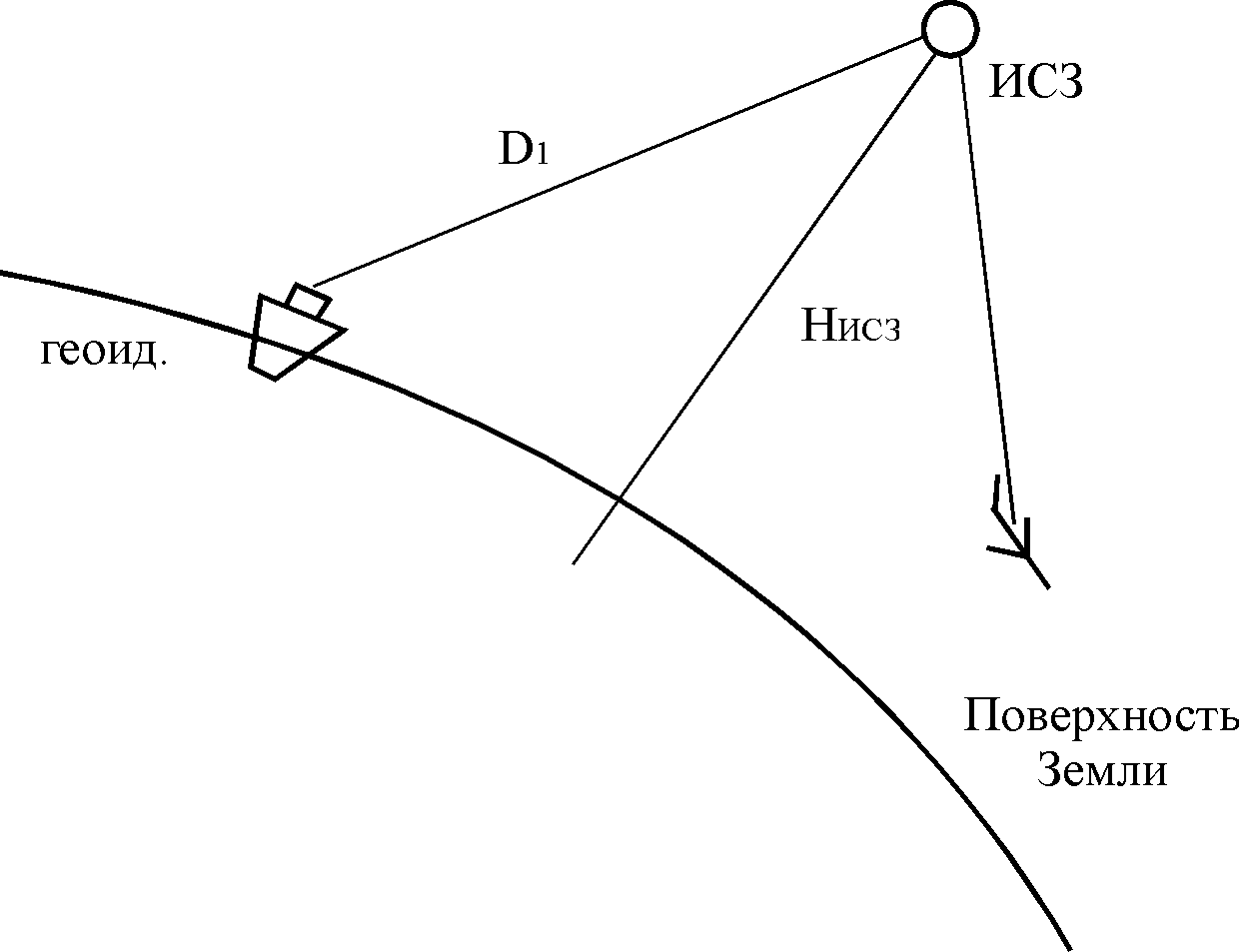
Рис. 12.3. Схема определения координат корабля и самолета с помощью направления на стационарный спутник
Современные радионавигационные системы основаны на измерении специальных сигналов со стационарных или низкоорбитальных спутников. Применение измерителей фазовых соотношений сигналов позволяет определить координаты с точностью до нескольких метров. Точное определение координат производят с помощь специальных спутниковых систем: GPS и НАВСТАР.
Иногда измерительную систему совмещают с портативной персональной ЭВМ, в памяти которой заложены карты местности, и она автоматически вызывает нужную карту и указывает на ней положение измерителя.
12.5. Системы радиоуправления
По характерным особенностям радиоуправления различают следующие системы радиоуправления: ракетами (СУР), спутниками (ИСЗ), космическими аппаратами (КА).
Типы ракет, используемых при радионаведении:
а) Поверхность- поверхность (Баллистические ракеты).
б) Воздух – воздух (ВВ)
в) Поверхность- воздух (ПВ).
г) Воздух- поверхность (ВП).
Структурная схема системы радиоуправления зенитными ракетами приведена на рис 12.4.
На схеме показано радиоуправление зенитными ракетами при взаимодействии РЛС с ЭВМ, рассчитывающей координаты цели и ракеты, определяющей оптимальную траекторию полета ракеты с упреждением передающей команды управления по командной радиолинии.
В настоящее время системы радиоуправления совершенствуются. Дальность действия достигает 400 км, а скорости управляемых ракет достигают 2 км/с, что позволят использовать их в противоракетных системах.
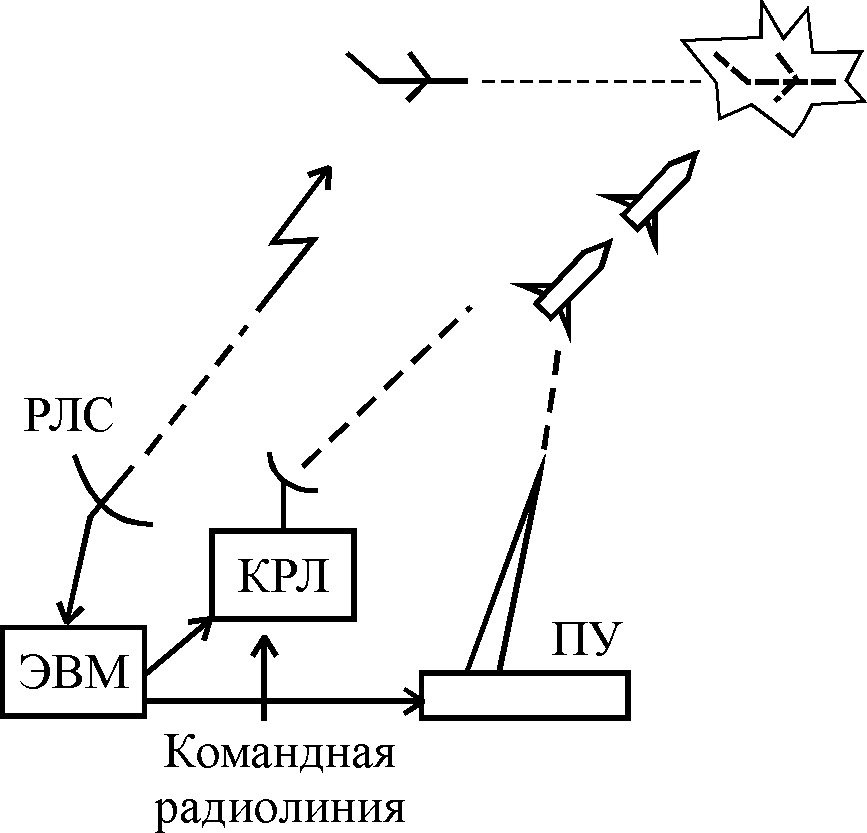
Рис. 12.4. Структурная схема системы радиоуправления зенитными ракетами
Функциональная схема взаимодействия соответствует функциональной схеме радиоуправления, приведенной в главе 1. Следует отметить, что система управления содержит кинематическое звено в виде ЭВМ, в которой рассчитывается оптимальная траектория движения ракеты к цели, и она постоянно корректирует траекторию, учитывая координаты и параметры скорости цели и ракеты. В динамическом звене системы происходит учет параметров движения и инерционности ракеты.
В системе управления участвует и автопилот ракеты с гироскопом, которые поддерживают заданное направление движения, управляя рулями ракеты, радиосигналы корректируют движение ракеты в соответствии с расчетами в кинематическом и динамическом звене.
В военной технике используются также системы самонаведения ракеты на цель с использованием активного облучения РЛС (рис. 12.5) или с использованием излучения радиотехнических средств самой цели.
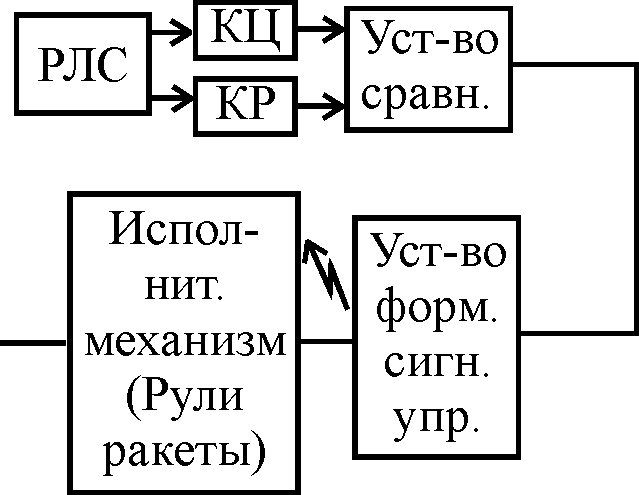
Рис. 12.5. Функциональная схема системы самонаведения с использованием РЛС
В других распространенных системах самонаведения используются инфракрасные датчики, которые отслеживают направление излучения горячих двигателей самолётов, вертолетов и наземной техники.
В связи с развитием полетов космических аппаратов возникла необходимость их стыковки на орбите. В этом случае, также как и в случае управления зенитной ракетой, важен учет законов динамики полета инерционного тела на орбите и выбор оптимальной траектории. Для управления космическими аппаратами разработаны специальные программы, учитывающие динамические особенности летательных аппаратов, энергетические характеристики двигателей и кинематику полета на орбите.
Схематическое изображение системы самонаведения КА со станцией на орбите показано на рис. 12.6.
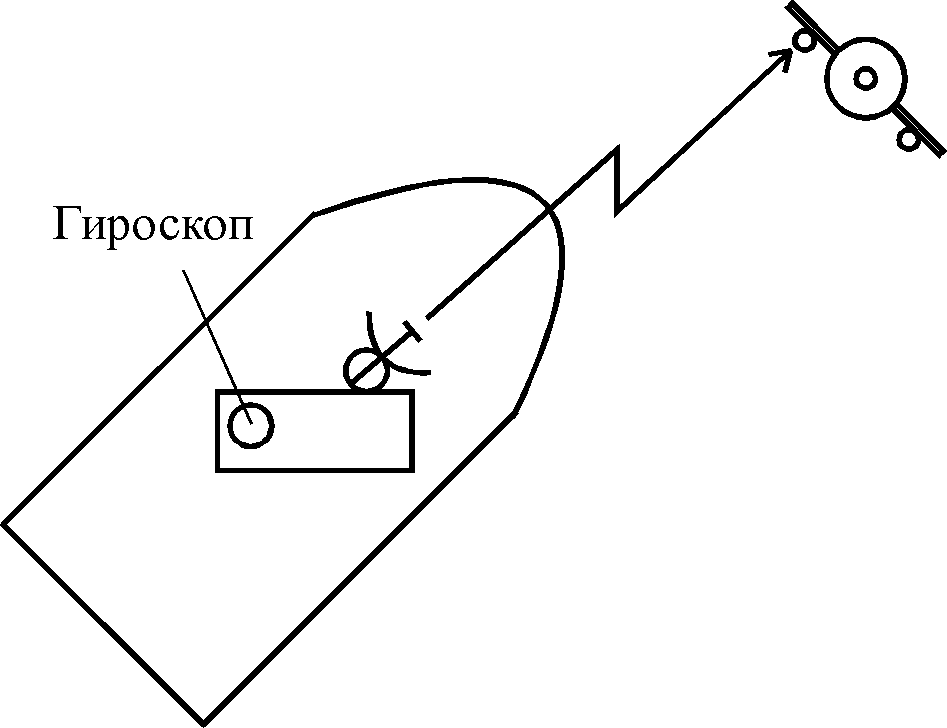
Рис. 12.6. Функциональная схема системы самонаведения КА
В системе управления имеется автопилот с гироскопом, которые поддерживают заданное направление движения, управляя двигателями КА, радиосигналы собственного локатора дают информацию об отклонении от направления на станцию. В кинематическом и динамическом блоках (звеньях) вырабатываются сигналы, корректирующие движение ракеты КА в соответствии с расчетами на оптимальную траекторию движения.
В гражданской и военной авиации разработаны и используются автоматизированные системы радиоуправления посадкой в трудных метеорологических условиях. Система осуществляет сближение траектории самолета с заданной путем воздействия на рули высоты, повороты и крена. При управлении посадкой самолета необходимо учитывать многие факторы: состояние атмосферы, ветер, инерционные силы, скорость и положение. Наиболее ярко такая система проявила себя при посадке космического возвращаемого корабля «Буран».