

10.2. Цифровые согласованные фильтры
В современных РЛС обработка сигналов производится на специальных ЭВМ с быстрой цифровой обработкой и фильтрацией цифровыми методами.
В согласованном аналоговом фильтре откликом является интеграл свертки:
 ,
,
где h() - импульсная характеристика СФ.
В частотной области согласованный фильтр реализуют с помощью быстрого преобразования Фурье по этапам:
а)
Определение спектра входного сигнала
(преобразование Фурье)
 .
.
б)
Определение комплексной частотной
характеристики с выхода фильтра
![]() .
.
в)
Определение выходного сигнала СФ
(обратное преобразование Фурье)
 .
.
В цифровом фильтре используют дискретные значения (nt) и K(kf), где t и f - шаг разбиения сигнала по времени и по частоте, n и k - целые числа.
Во временной области:
1)

В частотной области:
2)
 ,k=0,…,N-1
(Фурье-образ)
,k=0,…,N-1
(Фурье-образ)
![]() , k=0,…,N-1
, k=0,…,N-1
 ,
n=0,…,N-1
(обратное преобразование Фурье), где
,
n=0,…,N-1
(обратное преобразование Фурье), где![]() .
.
Цифровой фильтр - это совокупность математических правил (алгоритм и программа) преобразования сигналов, позволяющих вычислить величину выходного сигнала.
Некоторые величины, например, могут быть в ПЗУ. Разработаны алгоритмы - (быстрое преобразование Фурье), позволяющие упростить и ускорить вычисления. Структурная схема цифрового фильтра сигналов РЛС приведена на рис. 10.3.
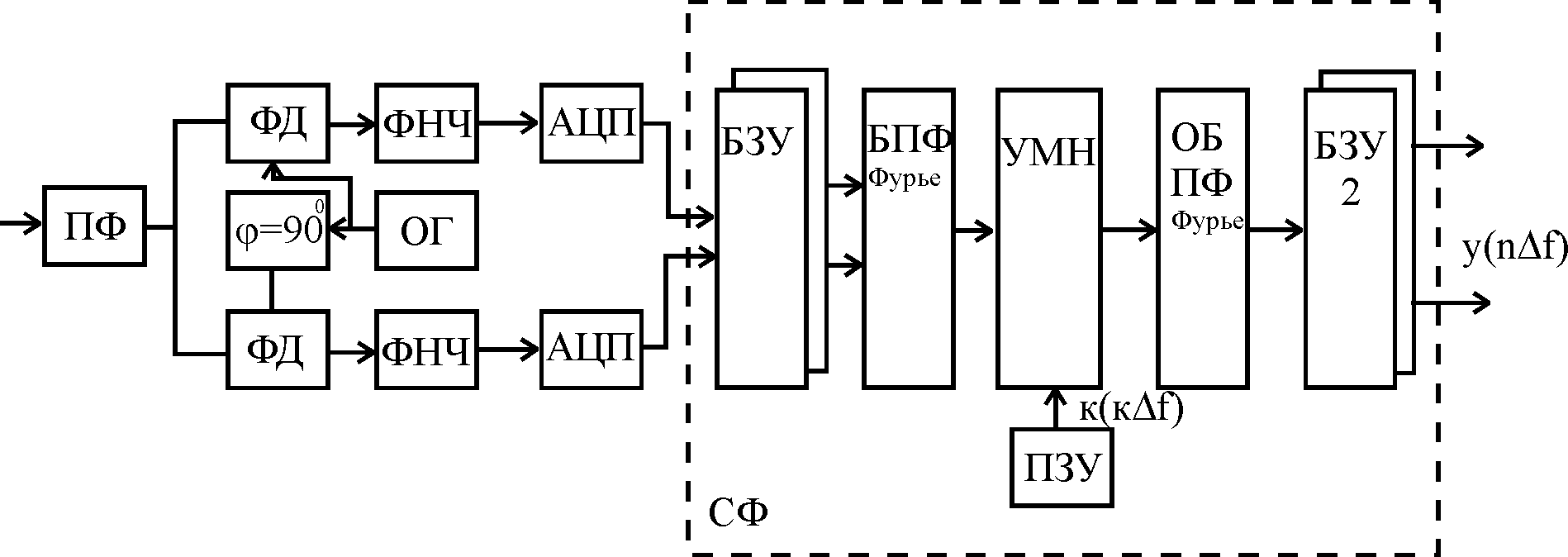
Рис. 10.3. Структурная схема цифрового фильтра
10.3. Накопители для пачек импульсных сигналов
Для выделения сигнала на фоне помех в РЛС используются схемы накопления сигналов пачки.
1) Простейший накопитель ЭЛТ с длительным послесвечением. Яркость нескольких импульсов складывается и возрастает (РЛС- обзорного типа).
2) Накопители с динамической памятью (рециркуляторы) реализуют с помощью ультразвуковой линии задержки (УЛЗ) с длительностью задержки з=Тсл (Тсл - интервал следования импульсов в РЛС, рис 10.4).

Рис. 10.4. Рециркулятор- накопитель с использованием ультразвуковой линии задержки (УЛЗ)
Для когерентной пачки импульсов применяют более сложные схемы накопления сигналов с фазовым детектированием и УЛЗ. В этом случае необходим сигнал опорного гетеродина, фазовый детектор и другие сложные устройства. Необходим также учет Доплеровского смещения частоты.
10.4. Оптимальный приемник для некогерентной пачки радиоимпульсов
Оптимальный приемник-накопитель для некогерентной пачки радиоимпульсов показан на рис. 10.5. Он включает супергетеродинный приемник с фильтром и фильтр-накопитель для обработки пачки импульсов на УЛЗ.
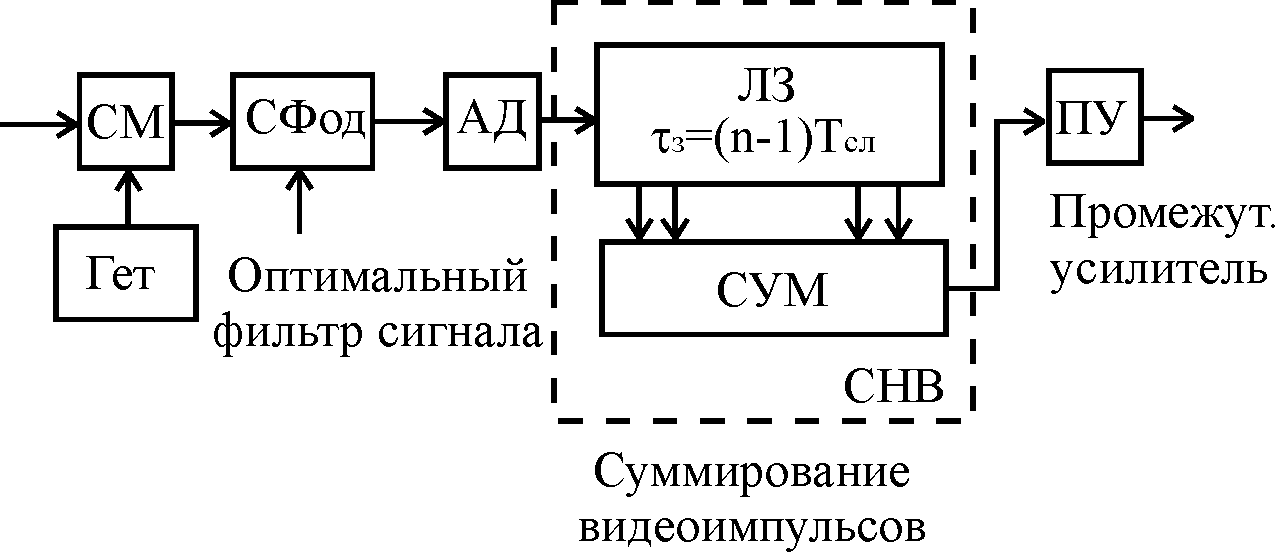
Рис.4.7. Оптимальный приемник-накопитель для некогерентной пачки радиоимпульсов
Недостатком приемника-накопителя является то, что в нем теряется информация о скорости, которую надо определять отдельным устройством.
Глава 11 Вычисление координат и параметров движения в рлс
11.1. Цифровые накопители (интеграторы)
Цифровые накопители имеют стабильную задержку и хорошее воспроизведение сигнала. Они могут применяться в когерентных и некогерентных РЛС совместно с цифровыми и аналоговыми согласованными фильтрами.
Элемент цифрового фильтра (ЦФ) некогерентной РЛС - бинарный квантователь (БК), в котором сигналы представляются в двоичной системе «да» (1) или «нет» (0), представлен на рис. 11.1.
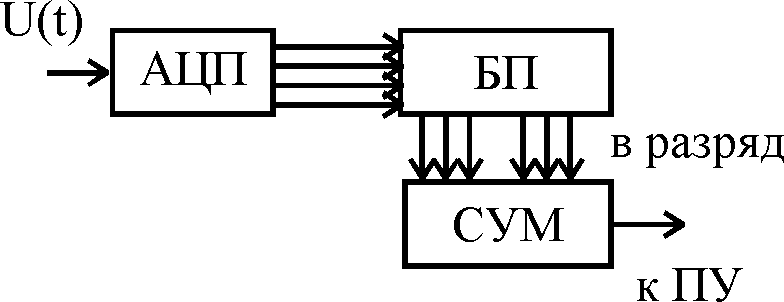
Рис. 11.1. Элемент цифрового фильтра некогерентной РЛС - бинарный квантователь
Особенность бинарного квантователя заключается в наличии логических решений, страхующих от ошибок, обусловленных действием помех. БК принимает решение о начале пачки импульсов, если прошли подряд два (или три) импульса с периодом следования зондирующих импульсов. За конец пачки импульсов принимается момент, когда прошли три пустых интервала подряд.
Структура импульсов и взаимодействие элементов БК показаны на рис. 11.2. Регистрируются только сигналы превышающие пороговый уровень.
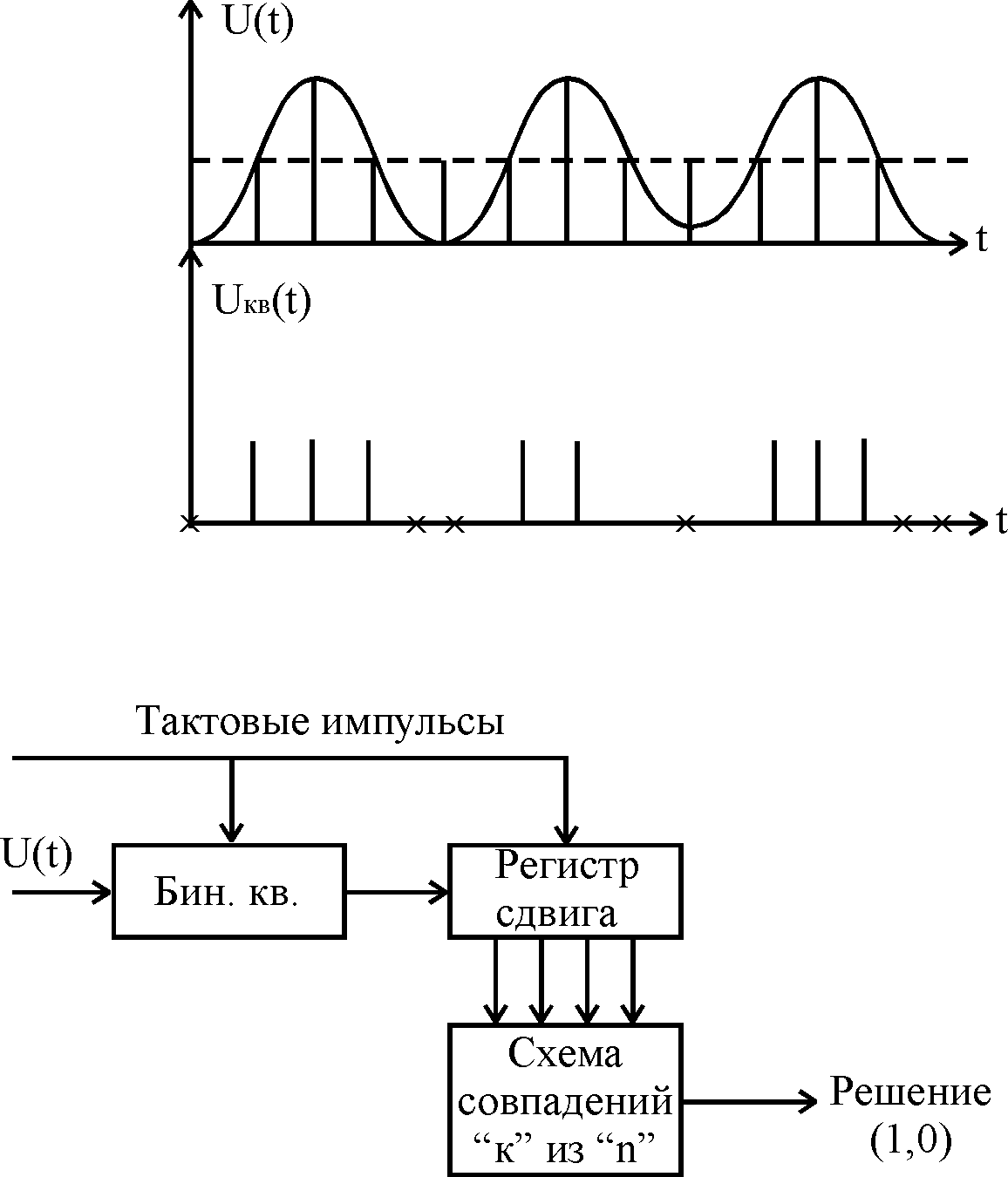
Рис. 11.2. Структура импульсов и их взаимодействие в БК.