

Оптимальное распознавание дискретных сигналов
Оптимальное распознавание дискретных сигналов особенно важно для радиолокации.
Вероятность ошибочных ситуаций:
![]() и
и
![]() .
.
Здесь P(реш 0/S) – вероятность ошибочного решения о том, что сигнала нет, в то время как он есть, P(реш S/0)- вероятность ошибочного решения о том, что сигнал есть, в то время как его нет.
Неправильные
решения могут иметь нежелательные
последствия и важно знать “ цену ”
ошибок:
![]()
![]() .
.
Средний риск (ущерб от неправильных решений) будет:
![]()
Критерий
оптимальности – минимум потерь:
![]()
При
решении задачи оптимальности обычно
используют вероятностное описание
сигнала и помехи:
![]() .
.
Минимум среднего риска обеспечивается при условии:
![]() ,
,
где
![]() многомерное распределение вероятности
сигнала и помехи.
многомерное распределение вероятности
сигнала и помехи.
![]() многомерное
распределение вероятности помехи.
многомерное
распределение вероятности помехи.
П
– порог, определяемый из условия минимума
потерь. Если
![]() - сигнала нет. При
- сигнала нет. При
![]() - сигнал есть.
- сигнал есть.
![]() называется
отношением правдоподобия (Байеса), П –
порог (критерий) правдоподобия.
называется
отношением правдоподобия (Байеса), П –
порог (критерий) правдоподобия.
Схема обнаружения сигнала на фоне помех
Система по схеме обнаружения сигнала на фоне помех определяет наличие или отсутствие сигнала не обращая внимания на степень воспроизведения самого сигнала. Оптимальное распознавание импульсных сигналов на фоне сильных помех можно осуществить с помощью устройства, схематически представленного на рис. 4.4.
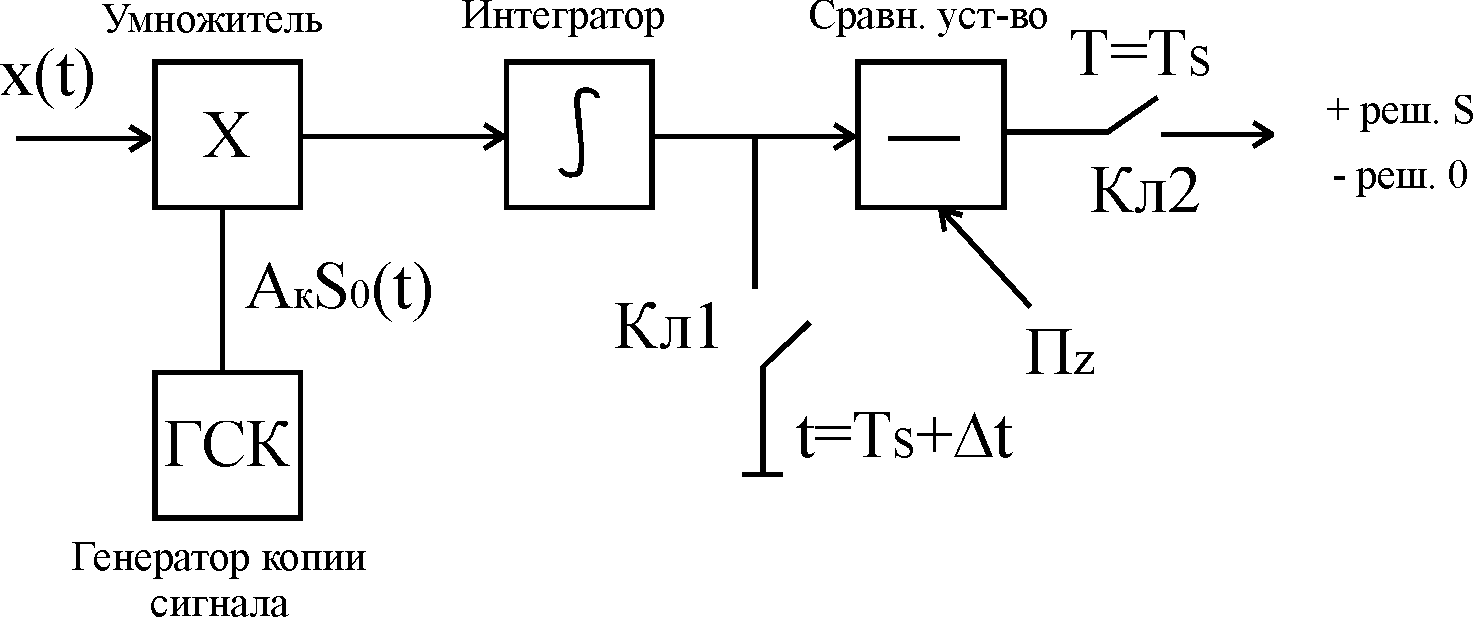
Рис. 4.4. Структурная схема устройства обнаружения импульсного сигнала на фоне помех
Устройство по схеме, представленной на рис. 4.4, осуществляет вычисление значения взаимной корреляционной функции между сигналом So(t) и копией сигнала (t) с последующим принятием решения о наличии сигнала на фоне помех.
Вычисление осуществляется по формуле:

Здесь приняты следующие обозначения:
![]() -
плотность мощности помехи,
-
плотность мощности помехи,
![]() -
амплитуда помехи,
-
амплитуда помехи,
![]() -
амплитуда сигнала,
-
амплитуда сигнала,
![]() -
функция корреляции
-
функция корреляции
![]() ,
,
При
![]() - режим S
(сигнал есть), при
- режим S
(сигнал есть), при
![]() - режим 0 (сигнала нет).
- режим 0 (сигнала нет).
Помеха
имеет случайную амплитуду
![]() и фазу
и фазу
![]() и поэтому при интегрировании нейтрализуется.
В момент
и поэтому при интегрировании нейтрализуется.
В момент
![]() отношение “сигнал/шум” максимально.
отношение “сигнал/шум” максимально.
Сигнал складывается в фазе с сигналом генератора копии сигнала (ГКС) (с небольшим отклонением по фазе) и интегрируется. В конце действия сигнала замыкается Ключ 2 и знак напряжения символизирует решение (+ - сигнал есть, - сигнала нет).
Приведенное устройство усредняет сигналы и помехи на интервале Ts и потому не воспринимает отдельные скачки амплитуды помехи.
4.8. Схема обнаружения сигнала со случайной фазой
В предшествующей схеме важно, чтобы сигнал совпадал по фазе с копией сигнала. В случае произвольной фазы сигнала можно использовать схему, представленную на рис. 4.5.
При
случайной фазе сигнал при
![]()
![]() .
.
Сигнал со случайной фазой можно рассматривать как сумму двух сигналов со случайной амплитудой с известной фазой и сигнал со сдвигом на π/2.
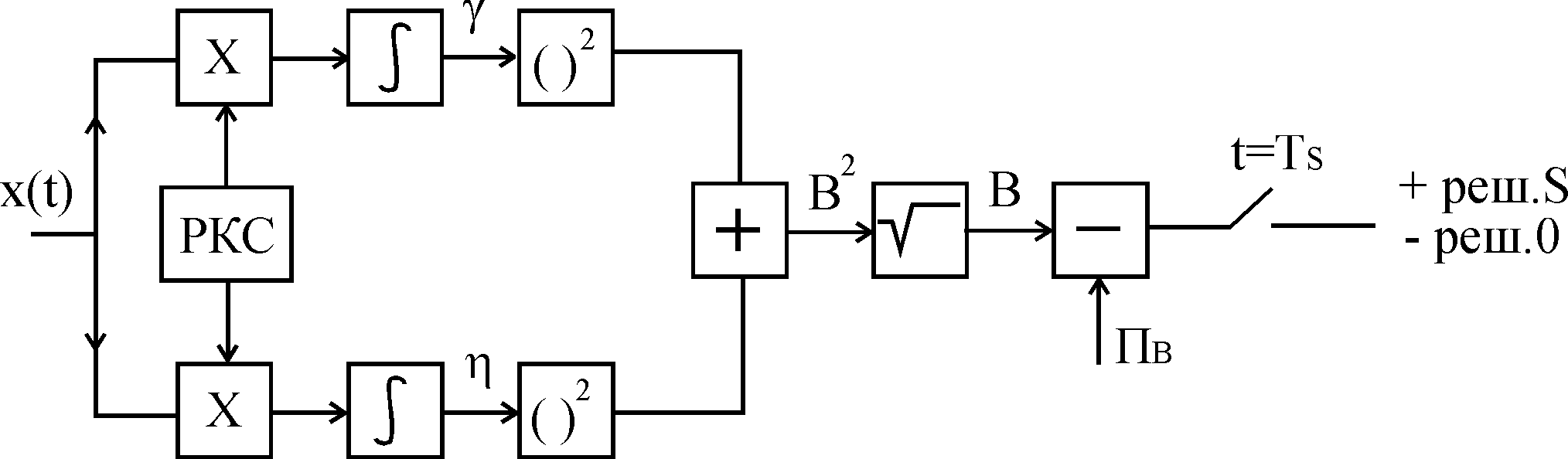
Рис. 4.4. Структурная схема устройства обнаружения импульсного сигнала со случайной фазой на фоне помех
Отклики складываются квадратурно и сравниваются с порогом:

В
выражении для порога
![]() используется функция Бесселя нулевого
порядка I0,
Ak
- амплитуда
копии сигнала, Es
- мощность сигнала, Nn
- мощность помехи.
используется функция Бесселя нулевого
порядка I0,
Ak
- амплитуда
копии сигнала, Es
- мощность сигнала, Nn
- мощность помехи.