

7.Устройство объединения сигналов
Главной функцией данного устройства является объединение выходных сигналов двух частотных каналов РЛС. На рис. 6.1 это устройство обозначено . В первичных РЛС с применением ФНК и встроенной АПОИ указанная функция является единственной. В других типах РЛС, в которых объединение сигналов основного и дополнительного лучей ДНА производится на видеочастоте и выходной сигнал РЛС, минуя АПОИ, поступает на контрольный индикатор КИ и на вход ШЛС, рассматриваемое устройство выполняет следующие функции:
объединение сигналов Осн. А двух частотных каналов РЛС;
объединение сигналов Доп. А двух частотных каналов РЛС;
коммутация объединенных сигналов Осн. А, Доп. А и сигнала СДЦ ведущего частотного канала для формирования зоны обнаружения РЛС; при этом сигнал СДЦ представляет собой коммутируемую последовательность сигналов Доп. СДЦ и Осн. СДЦ, формируемую в приемном устройстве;
передача сигналов Метео 1 и Метео 2 с выхода метеоканала к АПОИ, а импульсов границ Метео - к контрольному индикатору и на вход ШЛС;
накопление объединенного сигнала для повышения отношения сигнал-шум, очистка от несинхронных помех и девобуляция периода повторения с целью передачи этого сигнала на КИ и ШЛС.
Структурная схема устройства объединения сигналов приведена на рис. 1.20. Коммутатор сигналов и формирователь зон обнаружения КФ производит объединение сигналов двух частотных каналов РЛС. Операция объединения заключается в суммировании этих импульсов на видеочастоте. Коммутатор и формирователь КФ вместе с формирователем границ зон (ФГЗ) обеспечивают дистанционно-секторное формирование зоны обнаружения РЛС с целью получения минимального уровня ложных тревог в текущей помеховой обстановке. Коммутатор сигналов, формирователь зон и ФГЗ под воздействием
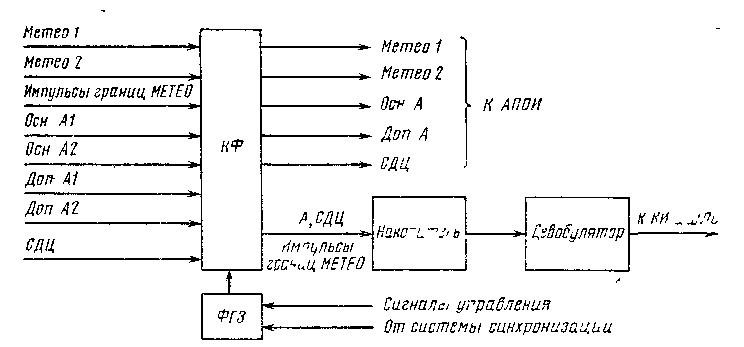
Рис. 1 20. Структурная схема устройства объединения сигналов
сигналов синхронизации разделяют зону обзора РЛС по азимуту на двенадцать 30-градусных секторов. В пределах каждого сектора с помощью органов управления, расположенных на передней панели контрольного индикатора, оператор РЛС может выбрать наилучшую комбинацию из имеющихся сигналов путем изменения положения границ К1, К2 и А по оси дальности. Текущую помеховую обстановку оператор наблюдает на экране КИ и, управляя режимами и параметрами РЛС в каждом из двенадцати секторов, добивается наилучшего согласования характеристик РЛК с помеховой обстановкой. При необходимости (при наличии областей с высоким уровнем помех) оператор может включить и установить: режим трехкратного ЧПВ, ВАРУ, поляризационную селекцию, устройство ЛОГ-МПВ-АнтиЛОГ, накопитель объединенного сигнала. Следует отметить, что включение некоторых из названных устройств приводит к потерям полезного сигнала, но в целом увеличивает отношение сигнал-помеха и создает более благоприятные условия для работы АПОИ, КИ и оконечных устройств ШЛС. При изменении помеховой обстановки требуется вмешательство оператора для корректировки режимов и параметров РЛС.
Сигнал с выхода КФ поступает в АПОИ для дальнейшей обработки, одной из основных функций которой является накопление полезного сигнала с целью получения высокого качества обнаружения и измерения координат целей. Такой же сигнал поступает через накопитель и девобулятор на КИ и оконечную аппаратуру ШЛС. Накопитель в данном случае выполняет функцию накопления полезного сигнала для повышения отношения сигнал-шум и защиты РЛС от несинхронных импульсных помех. Он включается оперативно с пульта управления РЛС при необходимости. Девобулятор осуществляет девобуляцию периода повторения принятого импульсного сигнала, необходимую для нормальной работы устройств формирования радиально-круговой развертки КИ. Рассмотрим принцип действия и особенности технической реализации этих устройств.
Накопитель импульсных сигналов представляет собой цифровой рециркулятор с задержкой входного сигнала на период повторения Тп и коэффициентом положительной обратной связи <1.
В состав рециркулятора должны входить устройства:
запоминания величины на период повторения,
умножения на постоянный коэффициент ,
сложения двух величин.
Структурная схема цифрового накопителя-рециркулятора приведена на рис. 1.21. Преобразование аналогового входного
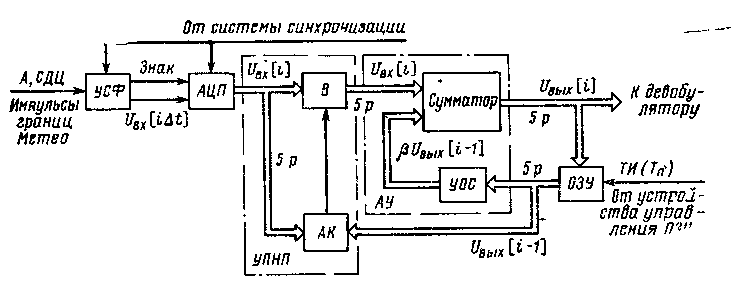
Рис. 1.21. Структурная схема цифрового рециркуляционного накопителя импульсных сигналов
сигнала в цифровую форму осуществляется устройством стробирования к фиксации (УСФ) и аналого-цифровым преобразователем АЦП таким же образом, как в каналах ЧПВ системы ЦСДЦ. На выходе АЦП формируется восьмиразрядный параллельный двоичный код (включая знаковый разряд). Поскольку рециркулятор достаточно хорошо работает при меньшем числе разрядов, чем система ЦСДЦ, то с целью сокращения объема памяти применяют обычно в рециркуляторах пятиразрядный код. В рассматриваемом случае младшие разряды 7 и 5 входного кода объединяются с помощью схемы ИЛИ и результат суммируется с разрядом 6. В итоге получаются пятиразрядное слово и знаковый разряд. Данная операция «округления» производится обычно на выходе АЦП, а через вентили В передается уже пятиразрядный код.
Рассмотрим работу накопителя в течение рабочего цикла, продолжительность которого равна одному периоду повторения импульсов РЛС. Пятиразрядный код, соответствующий входному сигналу Uвх, через открытые вентили В поступает на один из входов сумматора арифметического устройства. На другой вход этого сумматора из ОЗУ через устройство обратной связи УОС поступает пятиразрядный код выходного сигнала сумматора [Uвых(i-1)], полученного в предыдущем периоде повторения и умноженного в УОС на .
Входные коды сумматора являются прямыми. Сумматор является пятиразрядным параллельного типа с последовательным переносом единицы и обеспечивает получение на выходе суммы входных сигналов, как в прямом, так и в инверсном коде. Выходная информация сумматора является выходной информацией всего накопителя.
Принцип действия УОС поясняется на рис. 1.22. Это устройство выполнено на основе восьмиразрядного сумматора параллельного типа с
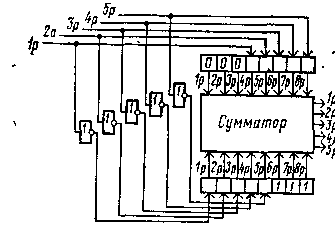
Рис 1.22. к принципу действия устройства обратной связи рециркуляционного накопителя
последовательным переносом единицы. Входное пятиразрядное слово в прямом коде поступает на входы 4, 5, 6, 7 и 8 разрядов 4 - 8, а через логические элементы ИЛИ-НЕ, формирующие инверсный код, разряды 1 - 5. На свободные входы разрядов 1 -3 постоянно подается 0, а на свободные входы разрядов 6 - 8- 1. В результате для опт=0,875 осуществляется операция х-х/8. На выход сумматора информация подается в прямом коде только с пяти старших разрядов после «округления», аналогичного описанному выше. Необходимо отметить, что для рассматриваемого УОС за счет использования операции «округления» опт=0,875 лишь для сигналов максимального уровня (5 бит). Для слабых сигналов, имеющих в трех последних разрядах 101 и менее (т. е. нули в старших разрядах), коэффициент обратной связи опт =1.
Устройство подавления несинхронных помех осуществляет селекцию полезных сигналов по частоте повторения импульсов РЛС. При этом используется факт, что сигналы других РЛС (несинхронные помехи) в смежных периодах повторения приходят в различные периоды временной дискретизации. Устройство подавления несинхронных помех состоит из анализатора кодов АК и вентилей В. Анализатор кодов сравнивает код входного сигнала Uвх и код накопленного сигнала UВых(i- 1). Для каждого элемента дальности с порогами (Uвх и UВых). Если на выходах обеих пороговых схем формируются 1 или 0; то вентили В остаются открытыми. Если же сигнал Uвх > Uвх 0, а UВых < UВых 0, т. е. входной сигнал превышает накопленный в определенное число раз, то этот сигнал принимается за помеху и вентили запираются, предотвращая доступ помехи в накопитель.
Рассмотрим принцип действия девобулятора. Изменение периода повторения импульсов РЛС применяется с целью борьбы со «слепыми» скоростями наблюдаемых объектов и подавления сигналов, обусловленных излучением в предыдущих периодах зондирования. В рассматриваемой РЛС используется трехкратное изменение периода повторения, т. е. величины трех смежных периодов повторения относятся как Тп1: Тп2: ТП3. Устройство то девобуляции преобразует последовательность импульсов ( переменным периодом повторения в последовательность импульсов с постоянным (средним) периодом повторения. Принцип действия девобулятора основан на том, что в каждом периоде зондирования параметр вобуляции, т. е. отклонение величины данного периода повторения от среднего значения, известен. Поэтому девобулятор содержит два канала с общим входом, в одном из которых имеется схема цифровой задержки (регистр сдвига), и коммутатор, осуществляющий выбор по жесткой программе либо сигнала из канала без задержки, если зондирующий сигнал имел задержку и, наоборот, выбор из канала с задержкой, если зондирующий сигнал был незадержанным. После девобулятора сигнал поступает на цифро-аналоговый преобразователь и далее на КИ и ШЛС.