

6.Система цифровой обработки сигналов и адаптации рлс
В современных РЛС АС ОВД данная система является одной из наиболее важных и сложных по характеру выполняемых функций. Она предназначена для обработки принимаемых сигналов с целью:
очистки полезного сигнала от различного рода помех (функция защиты);
стабилизации уровня ложных тревог (функция стабилизации);
выделения сигналов, несущих информацию о границах мощных метеообразований (функция выделения метеоинформации);
анализа текущей помеховой обстановки и формирования сигналов для автоматического управления структурой, режимами работы и параметрами РЛС (функция адаптации).
Выполнение первой функции обеспечивает увеличение отношения сигнал-помеха на выходе тракта приема и обработки сигналов. Это способствует повышению вероятности обнаружения цели и снижению вероятности ложных тревог на выходе РЛС. В связи с этим в РЛС третьего поколения наряду с основной функцией стабилизации используется функция адаптации, направленная в первую очередь на обеспечение стабильного уровня ложных тревог.
В цифровых системах обработки сигналов все операции обработки проводятся не с аналоговыми сигналами, а с их числовыми безразмерными эквивалентами, которые называются дискретными (или цифровыми) сигналами. Преобразование аналоговых сигналов в цифровую форму и обратно производится с помощью преобразователей- аналого-цифровых (АЦП) и цифро-аналоговых (ЦАП). При этом выборочное значение аналогового сигнала представляется, как правило, в виде числа в двоичной системе счисления (двоичного кода). Это позволяет, используя типовые элементы и устройства электронных цифровых вычислительных машин, выполнять такие операции над числами (кодами), как сложение, вычитание, умножение, запоминание, и реализовать на этой основе любой по сложности алгоритм обработки сигналов в реальном масштабе времени. Цифровая обработка радиолокационных сигналов имеет целый ряд преимуществ перед аналоговой:
возможность длительного накопления слабых сигналов и их запоминания,
стабильность характеристик цифровых устройств во времени при изменении питающих напряжений и температуры,
большой динамический диапазон, высокую точность выполнения арифметических операций,
высокую надежность,
высокое быстродействие,
малые габариты и массу,
возможность гибкой оперативной перестройки параметров (программы) этих устройств,
реализации цифровых адаптивных систем обработки сигналов, работающих в реальном масштабе времени.
С точки зрения технической эксплуатации важным преимуществом цифровой обработки является то, что цифровая аппаратура не требует подстройки и регулировки в процессе эксплуатации. Все установленные первоначально значения параметров алгоритмов обработки сохраняются неизменными в течение любого сколь угодно большого времени, если не принимать во внимание неисправности. Кроме того, цифровые устройства не требуют большого времени для прогрева оборудования и в меньшей степени чувствительны к вибрациям, чем аналоговые устройства.
Характерной чертой цифровой аппаратуры является использование стандартных элементов и устройств вычислительной техники для выполнения различных функций при обработке сигналов. Эта позволяет применять комплексирование отдельных устройств, т. е. одно и то же устройство использовать при выполнении других функций наряду с основной. Например, в импульсных РЛС с широким использованием цифровых устройств одни и те же цифровые схемы формирования сигналов синхронизации (тактовых импульсов) применяются для получения всех опорных сигналов РЛС. При этом достигается уменьшение «дрожания» временного положения импульсов до пренебрежимо малого уровня. Благодаря наличию большого числа одинаковых цифровых схем (регистров, сумматоров, счетчиков, пороговых схем, мультиплексоров и т. п.) в этих РЛС реализуется автоматический встроенный контроль работоспособности цифровой аппаратуры по принципу тестового контроля и сравнения выходных эффектов одинаковых схем при подаче на их входы общего тест-сигнала.
Общая структурная схема системы цифровой обработки сигналов и адаптации РЛС приведена на рис. 1.15.
В этой схеме условно можно выделить основной канал обработки сигналов, метеоканал и канал адаптации. Рассмотрим принцип действия данной системы сначала в целом.
Сигналы промежуточной частоты СДЦ(ПЧ1) и СДЦ(ПЧ2) поступают для обработки в цифровую систему СДЦ(ЦСДЦ) с выходов приемных устройств А и В двухчастотной РЛС. В состав ЦСДЦ входят два блока фазовых детекторов, на которые подаются входные сигналы и сигналы опорной промежуточной частоты. После фазового детектирования осуществляется выбор только одного входного сигнала для дальнейшей обработки в системе СДЦ. В двухчастотном режиме работы РЛС обрабатывается сигнал ведущего частотного канала. Выбранный видеосигнал преобразуется с помощью многоуровневого аналого-цифрового преобразователя, входящего в состав ЦСДЦ, в цифровую форму и затем обрабатывается в цифровом устройстве череспериодного вычитания. В рассматриваемой РЛС используется цифровая двухканальная система СДЦ с квадратурными каналами и двумя режимами череспериодного вычитания (двукратное или трехкратное вычитание).
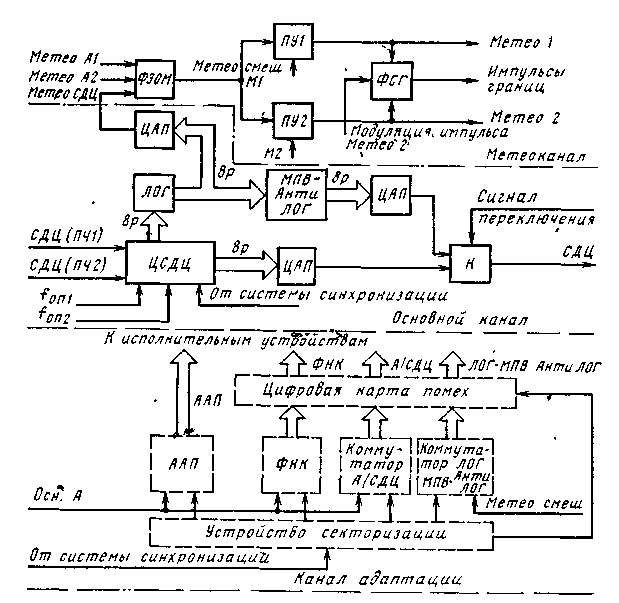
Рис. 1.15. Структурная схема системы цифровой обработки сигналов и адаптации РЛС
С выхода ЦСДЦ обработанный цифровой сигнал в виде восьмиразрядного двоичного кода (слова) поступает на входы цифро-аналогового преобразователя ЦАП и цифрового устройства ЛОГ – МПВ - АнтиЛОГ. Последнее предназначено для дополнительного подавления помех от мощных метеообразований, которые остались неподавленными за счет поляризационной селекции и обработки в системе СДЦ. Выходные сигналы ЦАП обоих каналов поступают на коммутатор режимов К, с помощью которого осуществляется выбор оператором с пульта управления РЛС одного или другого сигналов в зависимости от текущей помеховой обстановки. На выходе коммутатора формируется выходной аналоговый сигнал СДЦ основного канала обработки, который передается в устройство объединения сигналов и формирования зоны обнаружения РЛС.
Метеоканал состоит полностью из аналоговых устройств. На входы формирователя зоны обнаружения метеообразований (ФЗОМ) поступают сигналы Метео А1 и Метео А2 с амплитудных выходив приемных устройств А и В. Эти сигналы принимаются по основному лучу ДНА, проходят через аналоговые устройства ЛОГ соответствующих приемных трактов и поэтому на входе ФЗОМ имеют динамический диапазон не более 10 дБ. Кроме того, на третий вход ФЗОМ поступает сигнал Метео СДЦ, который представляет собой выходной сигнал системы СДЦ с динамическим диапазоном, тоже не превышающим 10 дБ благодаря обработке этого сигнала в цифровом устройстве ЛОГ (рис. 1.15). В устройстве ФЗОМ осуществляется выбор только одного сигнала типа Метео А для дальнейшей обработки аналогично выбору сигналов СДЦ(ПЧ1) и СДЦ(ПЧ2). В двухчастотном режиме работы используется сигнал Метео А ведущего канала. Сигнал Метео СМЕШ, на выходе ФЗОМ формируется таким образом, что в зоне действия системы СДЦ (рис. 1.2, участки 1- III) используется сигнал Метео СДЦ, а в дальней зоне (рис. 1.2, участок IV) сигнал Метео А1 (или Метео А2).
Сигнал Метео СМЕШ. поступает на два пороговых устройства ПУ1 и ПУ2 с разными порогами срабатывания М1 и М2. Порог М1 превышает уровень собственных шумов на 3-4 дБ, а порог М2 - на 6-8 дБ. На выходах пороговых устройств формируются импульсы прямоугольной формы с постоянной амплитудой, и длительностью, равной примерно времени пребывания текущих значений сигнала Метео СМЕШ над соответствующим порогом. При этом минимальная длительность сигнала Метео СМЕШ., на который реагируют пороговые устройства, составляет величину не менее 20 мкс. Благодаря этому в метеоканале осуществляется селекция по длительности сигналов, обусловленных отражениями от протяженных по дальности целей, к которым относятся области мощных метеообразований. Таким образом, на выходе метеоканала формируются два основных сигнала, представляющие собой две градации уровня помех от мощных метеообразований:
сигнал низкого уровня Метео 1,
сигнал высокого уровня Метео 2.
Эти сигналы по отдельным цепям передаются в устройство объединения сигналов и далее в АПОИ, где используются при формировании сигналов границ метеообразований.
Сигналы Метео 1 и Метео 2 поступают также на входы местного формирователя сигналов границ метеообразований ФСГ для контрольного индикатора. Выходной сигнал ФСГ представляет собой последовательность коротких импульсов с постоянной амплитудой, равной «логической единице», и длительностью каждого импульса 2-3 мкс. Эти импульсы соответствуют началу и концу сигналов Метео 1 и Метео 2, причем с целью различения этих сигналов импульсы Метео 2 модулируются по амплитуде напряжением типа «меандр» с периодом повторения модулирующих импульсов, равным (30-40) Тп (Тп - период повторения зондирующих импульсов РЛС). Импульсы границ Метео 1 и Метео 2 передаются в устройство объединения сигналов и далее - на контрольный индикатор и и на вход широкополосной линии связи для передачи на индикаторы - кругового обзора диспетчеров службы движения. На этих индикаторах с помощью импульсов Метео 1 формируется сплошная линия границы, а с помощью модулированных импульсов Метео 2- прерывистая линия границы метеообразований.
Характеризуя общую структурную схему рассматриваемой системы цифровой обработки сигналов, необходимо подчеркнуть, что возможности цифровой обработки радиолокационных сигналов в этой схеме реализованы в ограниченном объеме. В частности, в основном канале обработки отсутствуют устройства адаптации к изменяющейся помеховой обстановке. Предусмотрена только возможность оперативного перехода по инициативе оператора от режима двойного вычитания к режиму тронного вычитания и обратно, а также оперативное включение после ЦСДЦ устройства ЛОГ-МПВ-АнтиЛОГ при появлении на контрольном индикаторе помех от мощных метеообразований. Другими словами, предусмотрено только оперативное управление структурой, режимами и параметрами тракта обработки сигналов при активном участии оператора РЛС (автоматизированное управление).
В отличие от данной схемы в некоторых РЛС («Скала-МПР», «Скала-МПА», ATCR-22, АТСК-ФГ) производится обработка в ЦСДЦ сигналов не одного, а двух частотных каналов и, следовательно, при формировании зоны обнаружения РЛС используются сигналы СДЦ обоих частотных каналов. В этих же типах РЛС включение устройства ЛОГ-МПВ-АнтиЛОГ после ЦСДЦ производится автоматически и индивидуально для каждой ячейки зоны обнаружения в зависимости от текущей помеховой обстановки, т. е. реализована функция адаптации РЛС.
Следует также отметить, что в рассматриваемой РЛС информация о метеообстановке и местонахождении летательных аппаратов выделяется из одного и того же принимаемого сигнала, который обрабатывается в устройстве поляризационной селекции и в системе СДЦ (в ближней зоне обнаружения). При этом сигнал от метеообразований получается ослабленным и на выходе метеоканала выделяется информация только о мощных метеообразованиях. В последние годы при разработке новых РЛС наметилась тенденция использования отдельного метеорологического приемного тракта, осуществляющего прием отраженных сигналов с поляризацией, ортогональной по отношению к поляризации зондирующего сигнала. При этом обеспечивается выделение метеоинформации на выходе метеоканала при наличии в зоне действия РЛС менее мощных, но опасных для полетов очагов грозовой деятельности и других метеообразований. Повышение чувствительности метеоприемника РЛС позволяет реализовать эффективные устройства адаптации РЛС к изменяющейся метеообстановке.
Канал адаптации различных типов РЛС третьего поколения представляет собой набор устройств адаптации, объединенных общим принципом действия в сложную систему.
На практике наиболее широкое применение получили адаптивные методы, признанные универсальным средством преодоления априорной неопределенности, а РЛС с применением этих методов получили в литературе название адаптивных РЛС.
В состав типового устройства адаптации РЛС входят:
устройство разделения зоны обзора РЛС на элементарные участки по дальности и азимуту (ячейки зоны обзора); часто это устройство называют устройством секторизации;
анализатор текущей помеховой обстановки, осуществляющий выделение помехи определенного вида и оценку ее текущих параметров для каждой ячейки зоны обзора раздельно;
устройство памяти для запоминания на определенный промежуток времени результатов анализа помеховой обстановки (цифровая карта помех);
решающее устройство, обеспечивающее принятие решения о необходимости изменения структуры, режимов или параметров РЛС в соответствии с определенной программой и вырабатывающее соответствующий сигнал управления;
исполнительное устройство, выполняющее принятое решение под действием сигнала управления.
Все устройства, кроме исполнительного, входят в состав управляющей части системы адаптации РЛС и выполняются на основе цифровой техники обработки сигналов. Они показаны на рис. 1.15 условно пунктирными линиями, поскольку в конкретных типах РЛС некоторые из этих устройств могут отсутствовать.
Рассмотрим общий принцип построения основных устройств адаптации.
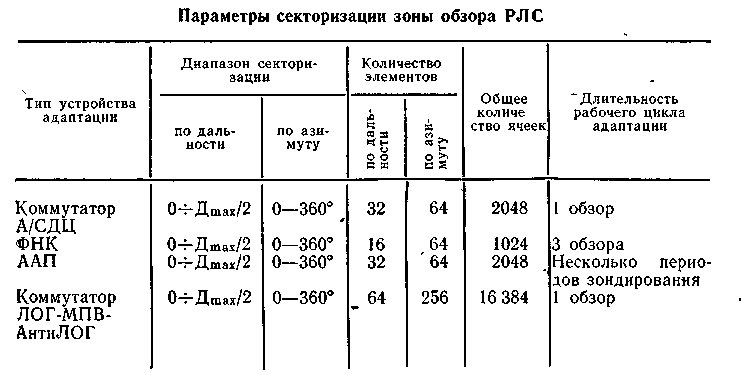
Устройство секторизации под воздействием сигнала синхронизации РЛС формирует совокупность тактовых импульсов, с помощью которых зона обзора РЛС разделяется по дальности и азимуту на ряд элементарных секторов - ячеек секторизации. Эти импульсы обеспечивают поочередный обзор ячеек секторизации. При этом имеется возможность устанавливать необходимый режим работы РЛС индивидуально для каждой ячейки. С помощью таких импульсов производится также управление процессом распределения памяти ОЗУ между ячейками секторизации при формировании цифровой карты помех и синхронизация работы устройств адаптации. Структура секторизации зависит от типа устройства адаптации.
Цифровая карта помех (ЦКП) для каждого устройства адаптации формируется индивидуально. Рассмотрим принцип формирования ЦКП для коммутатора А/СДЦ (рис. 1.15). Сигнал управления от устройства секторизации поступает на распределитель ячеек памяти, который выделяет из отведенной области ОЗУ одну ячейку памяти для каждой ячейки секторизации (табл. 1.1). На вход анализатора коммутатора А/СДЦ поступает аналоговый сигнал Осн. А с выхода приемного устройства ведущего частотного канала РЛС. При наличии ААП используется сигнал с выхода последнего каскада УПЧ ААП, не подверженный ослаблению в ААП.
В анализаторе осуществляются амплитудное детектирование этого сигнала, временная дискретизация с основным шагом М= (0,7- -0,8) ти и квантование по амплитуде на два уровня. Сформированный таким образом двоично-квантованный сигнал (ДКС) поступает на вход цифрового обнаружителя типа «к из n», применяемого во всех типах устройств адаптации РЛС.
Принцип действия цифрового обнаружения «к из n» можно пояснить с помощью рис. 1.16. За время рабочего цикла ТА обнаружитель производит анализ помеховой обстановки в N=32 ячейках секторизации, расположенных в одном азимутальном направлении в пределах первой половины Дmах. Рабочий цикл включает в себя L периодов зондирования
Таблица 1.1
Пороговое устройство выполняет функцию решающего устройства и получение на его выходе напряжения высокого уровня для j-й ячейки секторизации соответствует принятую решения о наличии помех в этой ячейке. При получении напряжения низкого уровня принимается решение, что помехи
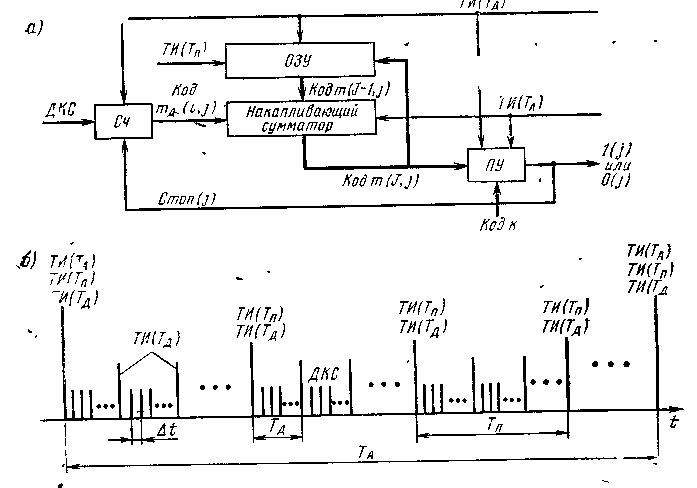
Рис. 1.16. К принципу действия цифрового обнаружителя «к из n»: а - упрощенная структурная схема, б - временная диаграмма для одного рабочего цикла
в этой ячейке отсутствуют. Поскольку при интенсивных помехах ПУ может сработать задолго до окончания рабочего цикла, то нет необходимости в дальнейшем накоплении суммы. Поэтому в схеме обнаружителя предусмотрен сигнал Стоп (1) для прекращения подсчета единиц ДКС в j-й ячейке. Принятое решение в конце рабочего цикла записывается в виде одноразрядного кода в соответствующую ячейку памяти цифровой карты помех, а накапливающий сумматор, ОЗУ и ПУ обнаружителя приводятся в исходное (нулевое) состояние к началу нового рабочего цикла. Наличие напряжения высокого уровня в ЦКП приводит к тому, что в следующем периоде обзора в данной ячейке секторизации будет произведен выбор сигнала СДЦ. Полная автоматическая загрузка ЦКП коммутатора А/СДЦ осуществляется за время одного обзора. Возможна также ручная загрузка ЦКП с пульта управления РЛС.
Благодаря применению коммутатора А/СДЦ удается избежать неоправданных потерь в дальности действия РЛС из-за включения режима СДЦ на тех азимутальных направлениях и ячейках, где отсутствуют помехи от местных предметов. Этот коммутатор обеспечивает избирательное включение режима СДЦ при реальной необходимости такого включения.
По такому же принципу построены и другие устройства адаптации. Различие между ними сводится к различию алгоритмов работы анализаторов помеховой обстановки и решающих устройств. Например, анализатор ФНК обеспечивает полную автоматическую загрузку ЦКП за три последовательных обзора. Формирователь нижней кромки работает в пределах первой половины максимальной дальности действия РЛС. Ячейки секторизации имеют такие же размеры, как и для коммутатора А/СДЦ, но общее их количество в 2 раза меньше. Это объясняется тем, что в пределах первой четверти Дмах (16 элементов дальности) используется заранее программируемая и постоянная функция ФНК, а в пределах второй четверти Дмах (вторые 16 элементов дальности) секторизация производится обычным способом. В анализаторе ФНК используется цифровой обнаружитель, аналогичный рассмотренному выше. Однако в отличие от рассмотренного двухальтернативного обнаружителя, который обнаруживает наличие одного из двух возможных состояний (0 или 1), обнаружитель ФНК является четырехальтернативным. При этом в каждой ячейке секторизации в конце рабочего цикла продолжительностью ТА = ЗТ0б3 (Тобз- период обзора РЛС) устанавливается наличие одного из четырех состояний согласно» табл. 1.2.
Функция четырехальтернативного обнаружителя ФНК выполняется с помощью двухальтернативного обнаружителя и разделения-процесса принятия решения на три этапа. Из рассмотренного ранее принципа действия ФНК (см. рис. 1.13) следует, что первый этап производится в течение первого обзора, в результате которого принимается решение 00 или 01. В. случае решения 01 выбирается тип луча «низкий», и уровень помех в данной ячейке уменьшается. На втором этапе в этой ячейке производится дополнительный анализ и принимается решение 01 или 10 и т. д.
Таблица 1.2
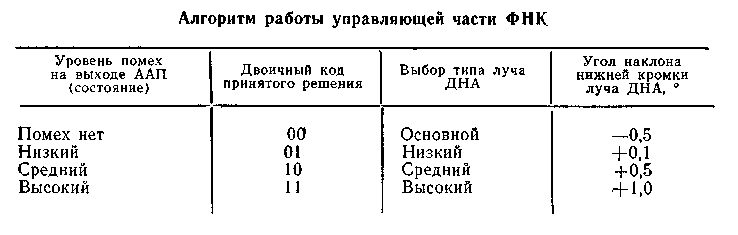
Запись двухразрядного кода принятого решения в ячейку памяти ЦКП ФНК производится в конце каждого интервала анализа (каждого этапа). Возможна также ручная загрузка ЦКП ФНК с пульта управления РЛС. Автоматическое управление положением нижней кромки ДНА производится только после полной загрузки ЦКП ФНК.
Адаптивный аттенюатор помех использует секторизацию, аналогичную секторизации коммутатора А/СДЦ (табл. 1.3). Отличительной особенностью ААП в сравнении с коммутатором А/СДЦ и ФНК являются более высокое быстродействие и выполнение функции адаптации в полном объеме. Действительно, коммутатор А/СДЦ и ФНК обеспечивают адаптацию РЛС к помеховой обстановке на -основе статической карты помех, которая автоматически загружается в течение одного или трех обзоров и затем остается неизменной, если не учитывать ее корректировку вручную оператором РЛС. Адаптивный аттенюатор помех обеспечивает адаптацию РЛС к изменяющейся непрерывно помеховой обстановке и поэтому имеет продолжительность рабочего цикла, равную нескольким периодам зондирования.
Таблица 1.3
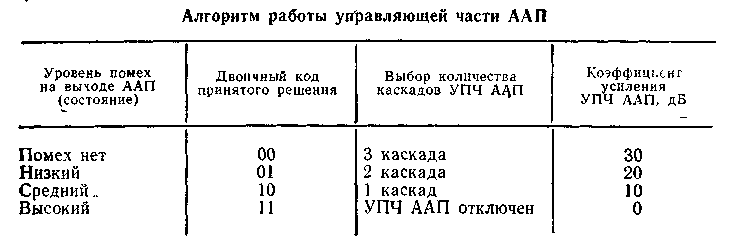
В каждом периоде зондирования комбинация из трех .нулей и единиц, формируемая тремя двухальтернативными обнаружителями, преобразуется логическим устройством в двухразрядный код текущей помеховой обстановки, который является кодом промежуточного решения. Этот код записывается в соответствующую ячейку памяти ОЗУ ААП и далее обрабатывается по следующему правилу. Если в данной ячейке секторизации в следующем периоде зондирования формируется другой двухразрядный код, то на выход поступает последний код в качестве окончательного решения и он остается неизменным в течение I следующих периодов зондирования.
Коммутатор ЛОГ-МПВ-АнтиЛОГ обеспечивает автоматическое включение устройства ЛОГ-МПВ-АнтиЛОГ на выходе ЦСДЦ при наличии помех от метеообразований в определенной ячейке секторизации. Благодаря этому имеется возможность локального автоматического подавления этих помех в зоне действия РЛС. При этом в .ряде случаев можно не переходить на круговую поляризацию излучаемых колебаний, применение которой приводит к ослаблению полезных сигналов примерно на 3 дБ. Цифровая карта помех данного коммутатора в отличие от аналогичной карты коммутатора А/СДЦ и ФНК является динамической и автоматически корректируется через каждые 16 периодов обзора. Полная загрузка ЦКП рассматриваемого коммутатора осуществляется в течение одного обзора с помощью анализатора, полностью совпадающего по принципу действия с анализатором коммутатора А/СДЦ. Отличие заключается только в том, что применяется более мелкая векторизация зоны обнаружения (см. табл. 1.1): используются 64 элемента дальности и 256 азимутальных секторов. Это обусловлено повышенными требованиями к разрешающей способности ЦКП при формировании контуров метеообразований. Запись одноразрядного кода принятого решения в ячейку памяти ОЗУ ЦКП производится в конце интервала анализа каждой ячейки секторизации.
Рассмотрим более подробно особенности технической реализации основного канала системы цифровой обработки сигналов.
Цифровая система СДЦ предназначена для выделения сигналов от движущихся целей и подавления сигналов от неподвижных и малоподвижных объектов (местных предметов и т. п.) в зоне действия РЛС. Главными особенностями рассматриваемой ЦСДЦ являются: использование истинной внутренней когерентности принимаемого и опорного сигналов, наличие двух квадратурных каналов и реализация двукратного и трехкратного череспериодного вычитания (при переключении с пульта управления РЛС).
Структурная схема ЦСДЦ представлена на рис. 1.17.
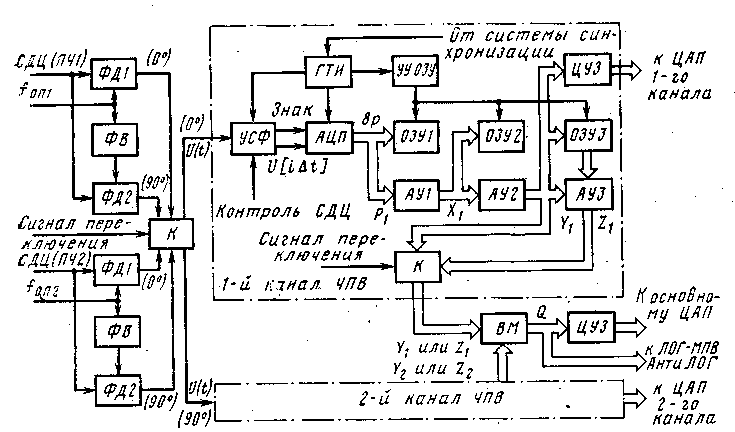
Рис. 1.17. Структурная схема цифровой системы СДЦ с двумя квадратурными каналами.
Как было отмечено выше, в двухканальной схеме череспериодного вычитания ЧПВ обрабатывается только один из входных сигналов (СДЦ(ПЧ1) или СДЦ(ПЧ2)]. Фазовое детектирование этих сигналов осуществляется независимо с помощью двух схем квадратурного фазового детектирования. Каждая схема состоит из двух фазовых детекторов ФД1, ФД2 и фазовращателя ФВ, обеспечивающего поворот фазы опорного колебания на 90°. Выбор для дальнейшей обработки пары видеосигналов, получаемых на выходах фазовых детекторов и обозначенных 0 и 90°, производится с помощью коммутатора К, который переключается с пульта управления РЛС. Эти сигналы подаются на входы двух идентичных каналов схемы ЧПВ, в каждом из которых осуществляются операции двукратного или трехкратного ЧПВ в цифровой форме. Выбор результатов двойного вычитания У\, У2 или тройного 2\, 22 производится с помощью коммутатора К, переключаемого оператором с пульта управления РЛС.
Выходной сигнал СДЦ в цифровой форме вычисляется с помощью вычислителя модуля ВМ по формуле:
![]() -
при двукратном ЧПВ;
-
при двукратном ЧПВ;
![]() -
при трехкратном ЧПВ.
-
при трехкратном ЧПВ.
Кроме того, в обоих каналах ЧПВ предусмотрен вывод сигналов Y1 и У2 для раздельного использования вместо основного выходного сигнала Q при некотором снижении эффективности работы ЦСДЦ. Благодаря этому повышаются показатели надежности как ЦСДЦ, так и РЛС в целом. Цифровые устройства задержки (ЦУЗ) обеспечивают необходимую задержку выходных сигналов, равную времени обработки сигнала в цифровом устройстве ЛОГ-МПВ-АнтиЛОГ (см. рис. 1.15).
Рассматриваемая ЦСДЦ представляет собой устройство квазиоптимальной обработки импульсно-модулированного радиолокационного сигнала со случайными амплитудой и фазой, принимаемого на фоне сильно коррелированной помехи. При этом имеется в виду случай медленных флюктуаций, когда амплитуда принимаемого сигнала практически не изменяется в пределах длительности импульса, а от одного импульса к другому изменяется как случайная величина. Необходимо подчеркнуть, что обработка полезного сигнала в данной схеме ЦСДЦ получается близкой к оптимальной при условии, если приемный тракт до входа ЦСДЦ является линейным для полезного сигнала и помехи. Это требование выполняется в современных РЛС третьего поколения, в которых для сжатия динамического диапазона входного радиолокационного сигнала и стабилизации уровня ложных тревог используются в качестве основных устройств формирователь нижней кромки ДНА и адаптивный аттенюатор помех, а в качестве неосновного средства - ВАРУ. Применение только ВАРУ для сжатия динамического диапазона входного сигнала в канале СДЦ, как это имеет место, например, в схеме на рис. 1.11, не обеспечивает в ряде случаев защиты приемного тракта от перегрузки, так как мощность помехи не всегда уменьшается с увеличением дальности. Кроме того, действие ВАРУ при отсутствии помех вызывает снижение чувствительности приемного тракта.
Важным преимуществом ЦСДЦ с двумя квадратурными каналами является практически полное устранение провалов чувствительности системы СДЦ при значениях фазового сдвига между принимаемым и опорным колебаниями именуемых «слепыми» фазами. Благодаря сдвигу фаз на 90° опорных колебаний, подаваемых на ФД1 и ФД2 в схеме квадратурного фазового детектирования, зонам «слепых» фаз в канале ФД1 всегда соответствуют зоны максимальной чувствительности системы СДЦ в канале ФД2 и наоборот. В результате обеспечивается устранение эффекта «слепой» фазы.
Применение такой схемы в аналоговых системах СДЦ было затруднено в связи со сложностью реализации вычислителя модуля (ВМ). Однако при переходе к цифровым системам такой метод построения стал естественным.
Для обеспечения высокого быстродействия вычислительных устройств применяется обычно представление сигнала в параллельном коде.
В рассматриваемом типе ЦСДЦ период тактовых, импульсов ГТИ равен 0,3 мкс, т. е. в 9 раз меньше периода дискретизации t = 2,7 мкс. При этом первые восемь тактовых импульсов обеспечивают формирование восьми значащих разрядов цифрового кода, а девятый импульс - прибавление знакового разряда и видоизменение цифрового слова, которое заключается в преобразовании прямого кода отрицательного числа в обратный код. Вместе обратного кода может применяться также дополнительный код В результате на выходе АЦП вырабатывается восьмиразрядный код входного сигнала, который сохраняется неизменным в течение следующего периода временной дискретизации.
Операция череспериодного вычитания (двойного или тройного) реализуется с помощью оперативных запоминающих устройств ОЗУ1 - ОЗУЗ и арифметических устройств АУ1-АУЗ. Каждое ОЗУ обеспечивает запись входного восьмиразрядного слова, полученного в 1-м элементе дальности, и считывание этого слова через интервал времени, равный периоду повторения Тп. При этом ОЗУ используется в качестве цифрового аналога линии задержки, обеспечивающей задержку входного сигнала на время Тп. С помощью устройства АУ1 осуществляется вычисление первой разности X1 задержанного и незадержанного сигналов, которая в свою очередь запоминается в ОЗУ2 и используется для вычисления второй разности Y1. Аналогично вычисляется и третья разность Z1. Цифровые разности У1 и Z2 являются выходными сигналами первого канала ЧПВ.
Каждое из устройств ОЗУ1-ОЗУЗ представляет собой адресное ОЗУ с произвольным доступом и имеет объем N = 960 ячеек, равный общему числу элементов дальности. Каждой ячейке памяти емкостью п = 8 бит, рассчитанной на запоминание одного цифрового слова, присваивается порядковый номер или абсолютный адрес от 1 до N, по которому производятся засылка и считывание информации .одной командой. Управление работой ОЗУ осуществляется с помощью устройства управления УУ ОЗУ, которое под воздействием тактовых импульсов ГТИ вырабатывает код адреса ячейки памяти и импульсы «запись - считывание» для ОЗУ.
Арифметические устройства АУ1 - АУЗ идентичны и каждое из них состоит из входного статического регистра задержанного сигнала, входного статического регистра незадержанного сигнала, сумматора и выходного статического регистра. Все регистры выполняют функции быстродействующей оперативной памяти и построены на основе Д-триггеров, Входные регистры служат для совмещения во времени задержанного и незадержанного сигналов на входе сумматора комбинационного типа. Запись информации в эти регистры осуществляется при поступлении первого тактового импульса ТИ1. Запись информации в выходной регистр осуществляется при поступлении второго тактового импульса ТИ2, который задержан относительно ТИ1 на время, несколько большее времени общего переноса сумматора.
Принципиальная схема арифметического устройства в упрощенном виде показана на рис. 1.18. Схема каждого разряда сумматора построена согласно уравнению
S = А*В*Р + Р'*(А + В + Р),
где Р'=А*В*В*Р*А*Р; А и В - слагаемые данного разряда; Р - перенос из предыдущего разряда.
Знаки умножения и сложения в уравнении соответствуют логическим операциям И и ИЛИ. Знак результата суммирования получается путем двоичного суммирования знаков, слагаемых в сумматоре с учетом переноса из последнего восьмого разряда. Восьмой разряд сумматора служит как бы дополнительным разрядом на случай, когда разность займет больше разрядов, чем каждое из слагаемых (рис. 1.18).
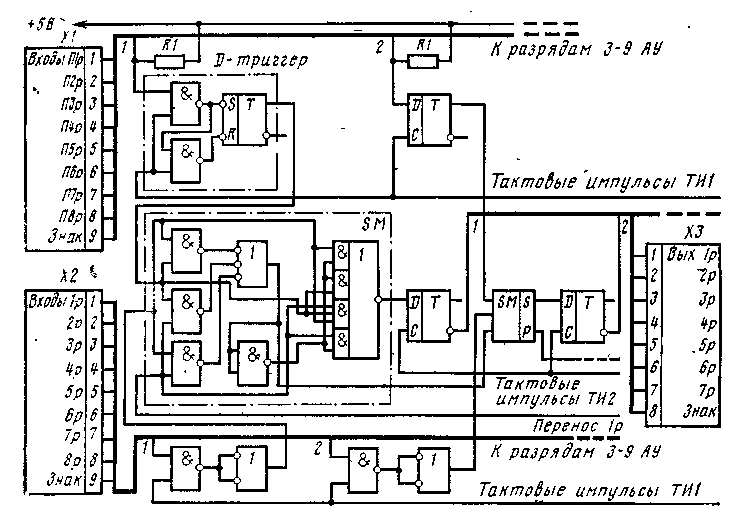
Рис. 1.18. Принципиальная схема арифметического устройства канала ЧПВ
Для обеспечения идентичности АУ1, АУ2 и АУЗ на выходе сумматоров этих устройств производится объединение двух старших разрядов, чтобы на выход АУ при использовании восьмого разряда поступал такой же код, как и в случае, когда этот разряд не используется. Таким образом, на выходе АУ формируются семиразрядный код разности и ее знак, которые записываются в выходном регистре АУ.
Рассмотрим особенности технической реализации вычислителя модуля ВМ (рис. 1.18). На практике применяется несколько алгоритмов приближенного вычисления модуля (двукратное ЧПВ). Наибольшее распространение получил следующий алгоритм:
Q
= | Y1
+
![]()
У2,
если | Y1
<
У2.;
У2,
если | Y1
<
У2.;
Q = | Y2 + У1, если | Y1 У2.
Погрешность вычисления модуля таким способом не превышает 12%. В ЦСДЦ РЛС АТСR-22 и АТСR-44 применяется другой алгоритм приближенного вычисления, равноценный предыдущему по точности
Q = (| Y1 + У2, + mах (| Y1 + У2)),
где mах (а или b) означает операцию выбора наибольшей из двух неотрицательных величин.
На выходе ВМ формируется восьмиразрядный код неотрицательного числа, который передается к устройству задержки и устройству ЛОГ-МПВ-АнтиЛОГ.
Цифровое устройство задержки (ЦУЗ), включенное после ВМ, предназначено для выравнивания запаздывания сигнала в двух параллельных трактах обработки, в одном из которых включено устройство ЛОГ-МПВ-АнтиЛОГ. Устройство ЦУЗ обеспечивает задержку входной информации на пять тактов и объединение шестого, седьмого и восьмого разрядов. Данное устройство выполнено на jk-триггерах по схеме сдвигового регистра в каждом разряде.
Таким образом, на выходе ЦСДЦ формируется шестиразрядный код положительного числа - цифровой аналог нескомпенсированного остатка череспериодного вычитания. При этом на выходе ЦАП образуется однополярное напряжение, пропорциональное абсолютному значению нескомпенсированного остатка.
Следует отметить, что рассмотренная система ЦСДЦ представляет собой реализацию цифрового нерекурсивного фильтра второго (или третьего) порядка. Как известно, более высокие показатели можно получить реализацией ЦСДЦ в виде цифрового рекурсивного фильтра (с обратными связями). Однако в этом случае арифметические устройства ЦСДЦ должны выполнять дополнительно операции умножения, которые предъявляют более высокие требования по быстродействию вычислительных устройств.
Цифровое устройство ЛОГ-МПВ-АнтиЛОГ предназначено для дополнительного подавления помех от метеообразований, которые остались неподавленными после обработки сигналов ЦСДЦ. Наличие остатков помех от метеообразований на выходе ЦСДЦ обусловлено, в частности, тем, что метеообразования медленно перемещаются под воздействием ветра относительно РЛС, а отраженные от них сигналы являются случайными, близкими по характеру к шуму.
Поэтому отраженные от метеообразований сигналы не подавляются системой СДЦ так же эффективно, как сигналы от местных предметов. Устройство ЛОГ-МПВ-АнтиЛОГ в сочетании с адаптивными устройствами РЛС позволяет осуществлять локальное подавление помех от метеообразований. В состав рассматриваемого устройства входят: логарифмический преобразователь кодов (ЛОГ), цифровой аналог цепи малой постоянной времени (МПВ) для устранения постоянной составляющей сигнала от метеообразований и антилогарифмический преобразователь кодов (АнтиЛОГ).
Рассмотрим особенности технической реализации составляющих его элементов.
Логарифмический преобразователь ЛОГ осуществляет преобразование входного сигнала Uвх в выходной сигнал UВых согласно формуле:
Uвых = а lоg (1+b Uвх),
где а и Ь - коэффициенты пропорциональности.
Для устранения постоянной составляющей сигнала Uвых применяется цифровой дискриминатор сигналов по длительности (аналог цепи МПВ). Структурная схема дискриминатора приведена на рис. 1.19. Блок регистров сдвига состоит из восьми одинаковых 9-разрядных регистров сдвига,
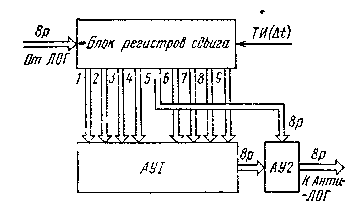
Рис. 1.19. Структурная схема цифрового устройства МПВ
управляемых тактовыми импульсами ТИ (t). С помощью каждого регистра производится запоминание одного из восьми разрядов кода сигнала, поступающего с выхода ЛОГ. Одновременно в регистре содержатся значения этого разряда для девяти смежных элементов дальности. В арифметическом устройстве АУ1, выполненном на основе параллельных сумматоров, осуществляются суммирование восьмиразрядных слов для элементов 1-4, 6-9 дальности и деление полученной суммы на число слагаемых, т. е. на восемь. Операция деления выполняется отбрасыванием трех младших разрядов суммы (сдвиг вправо на три разряда). На выходе АУ1 формируется восьмиразрядный код среднего значения входного сигнала в пределах восьми элементов дальности, т. е код постоянной составляющей сигнала, имеющего длительность 8t (t - основной шаг временной дискретизации).
В арифметическом устройстве АУ2 производится операция вычитания из кода сигнала, полученного в пятом элементе дальности, Эта операция выполняется с помощью параллельного сумматора и преобразования кода, вычитаемого в дополнительный код.
Как известно, применение логарифмического преобразования приводит к некоторому ухудшению различимости полезных сигналов на фоне шума и остатков сигналов от метеообразований. Поэтому после устройства МПВ включается обычно устройство с антилогарифмической характеристикой преобразования, обеспечивающее улучшение различимости при условии, что полезный сигнал превышает уровень помех на входе этого устройства.
Восьмиразрядный код сигнала Uвх поступает на вход устройства АнтиЛОГ, которое аналогично устройству ЛОГ выполняется в виде ПЗУ. На выходе ПЗУ формируется параллельный пятиразрядный код сигнала Uвых, являющийся выходным эффектом устройства ЛОГ-МПВ-АнтиЛОГ.