

8.3.2. Характеристики систем самонаведения
Отметим вначале основные особенности РВЦ, определяемые системой самонаведения. В РВЦ могут быть применены рассмотренные ранее методы пеленгации, использующие непрерывные и импульсные сигналы. Из-за большого отношения максимальной и минимальной мощностей принимаемого сигнала требуется применение автоматической регулировки усиления (АРУ) приемника с большим динамическим диапазоном, составляющим 80-100 дБ. АРУ должна обеспечивать достаточное быстродействие, особенно на близких к цели расстояниях R0ц, где мощность входного сигнала нарастает по закону 1/R20ц . Для селекции целей в РВЦ включаются системы автосопровождения по дальности и по скорости, в которых предусматривается соответствующий режим поиска и захвата цели по сигналам от системы целеуказаний. Системы селекции позволяют снизить действие помех, попадающих на вход РВЦ.
Рассмотрим структурную схему линеаризованной системы самонаведения (для случая траектории цели и ДА, расположенных в одной плоскости), использующей метод параллельного сближения (рис 8.8). Следящая ГСН представлена инерционным звеном, соответствующим РВЦ, причем это звено охвачено обратной связью через интегратор (гироскоп). Малые поперечные перемещения цели rпц и ЛА (снаряда) rп0д можно считать пропорциональными угловым отклонениям:
rпц(t) R0ц(t) ц (t); rп0(t) R0ц(t) 0 (t).
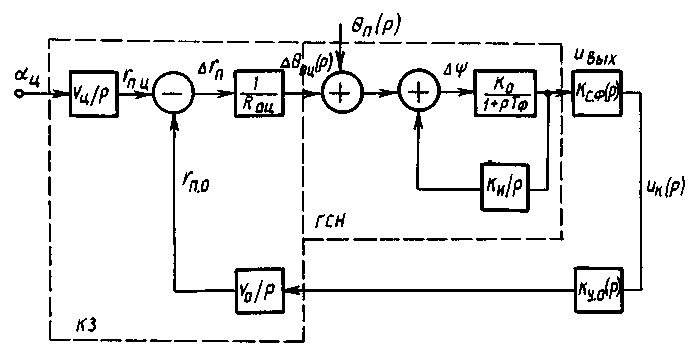
Рис. 8.8. Структурная схема линеаризованной системы самонаведения
Передаточная функция Кcф(р) на рис. 8.8 характеризует систему формирования команд, Ку0(р) - корпус ЛА с автопилотом и выходным звеном, описывающим маневренные качества ЛА. Кинематическое звено (КЗ) формирует разность rпц - rп0 = rп/R, от величины которой зависит угол разворота 0ц линии визирования R0ц : r0ц = гп /RОц .
На малых расстояниях между ЛА и целью в системе необходимо учитывать переменность параметров, обусловленных быстрым изменением величины 1/R0ц(t).
Промах при самонаведении определяется величиной мертвой зоны Rмз=R0ц.(tв) (минимальным расстоянием, при котором работает РВЦ), скоростью сближения vcбл в момент t = tв и угловой скоростью вращения линии визирования на границе мертвой зоны. Увеличение промаха обусловлено действием помех на ГСН, инерционностью системы при наведении на маневрирующие цели. Паразитные связи в контуре управления, которые возникают при неидеальной стабилизации ГСН и при искажении тепловых и радиоволн приводят к дополнительным ошибкам самонаведения.
Список литературы
Агаджанов П А, Воробьев В Г, Кузнецов А А, Маркович Е Д Автоматизация самолетовождения и управление воздушным движением - М Транспорт, 1980 - 258 с.
Аподина Т Г, Кузнецов А А Автоматизация управления воздушным движением - М Знание, 1984 - 64 с.
Бакулев А П Стенин В М Методы и устройства селекции движущихся целей - М Радио и связь, 1986 -288 с.
Давыдов П С Техническая диагностика радиоэлектронных устройств и систем - М Радио и связь, 1988 -256 с.
Давыдов П С, Козлов А.И. и др. Радиолокационные системы воздушных судов - М Транспорт, 1988 -359 с.
Давыдов П. С., Сосновский А.А., Хаймович И.А./ Авиационная радиолокация ( Справочник/ Под ред. П С Давыдова - М , Транспорт, 1984 - 224 с.
Игнатов В. А. Теория информации и передачи сигналов -М. Сов радио, 1979 - 280 с.
Кочан В К Перевезенцев Л Т , Сокол В В Радиооборудование автоматизированных систем управления воздушным движением - Киев Высшая школа, 1984- 312с.
Перевезенцев Л Т, Зеленков А Г, Огарков В Н Радиолокационные системы аэропортов Под ред Л Т Перевезенцева – М Транспорт, 1981 -378 с
Пестряков В Б, Кузенков В Д Радиотехнические системы -М Радио и связь, 1985 -376с.
Радиолокационное оборудование автоматизированных систем ОВД/ Кузнецов А А, Козлов А И, Логачев В П и др. - М Транспорт, 1985 – 344с.
Финкельштейн МИ Основы радиолокации - 2 е изд. - М, Радио и связь, 1983 - 536 с.
Грачев В В, Кейн В М Радиотехнические средства управления воздушным движением -М Транспорт, 1975 -343 с.
2
БВК 39.571.55 3
ВВЕДЕНИЕ 4
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ 9