

8.2. Измерение координат целей в пассивной (тепловой) радиолокации
Для определения дальности пассивными методами используют измерение угловых координат цели из двух точек, расположенных на заданном расстоянии d. Таким образом, применяется косвенный метод определения дальности по известной стороне и двум углам треугольника. Угломерный метод основан на измерении углов визирования двух различных опорных точек относительно плоскости ВС. Поверхности положения имеют вид конусов с вершинами в опорных точках (например, ИСЗ). Линия сложения - это прямые, пересечение которых определяет координаты ВС (рис. 8.3).
Необходимая точность определения дальности зависит от направленных свойств радио-теплолокаторов. Пеленгация источников осуществляется с помощью амплитудных методов. В режиме обзора - это метод максимума, в режиме слежения - метод сравнения амплитуд, реализуемый, в частности, на основе конического сканирования диаграммы направленности антенны.
Для пеленгации может быть использован также разнесенный прием, применяемый в фазовых системах измерения угловых координат. Структурная
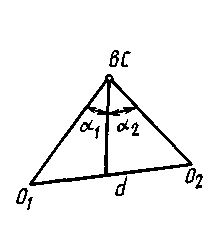
Рис.8.3. Угломерный метод
схема корреляционного следящего пеленгатора, использующего разнесенный прием сигналов от удаленного источника, приведена на рис. 8.4. В основе формирования пеленгационной характеристики системы лежат свойства
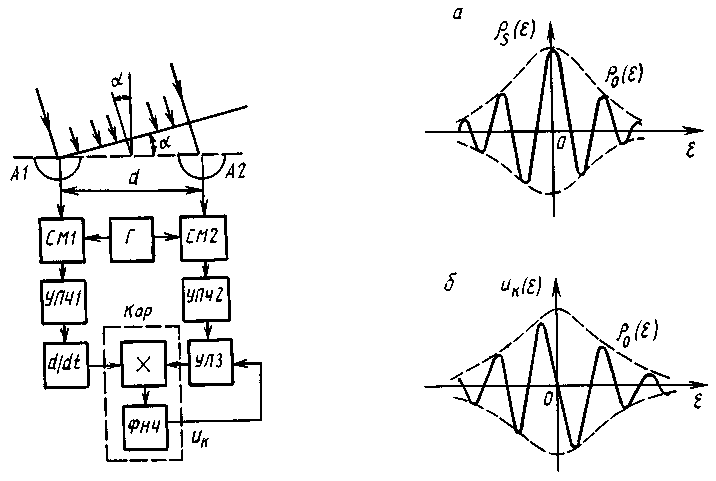
Рис.8.4. Структурная схема корреляционного следящего пеленгатора
корреляционной функции случайного процесса sc (t). Известно, что взаимная корреляционная функция Rss ' процесса sc (t) и его производной по времени
dsc/dt определяется соотношением

т.е. взаимная корреляционная функция является производной по аргументу автокорреляционной функции процесса rs (r).
За счет разнесения антенн на базу d образуется пространственное запаздывание, обусловленное отклонением направления прихода радиоволн от нормали к базе на угол а. Запаздывание определяется выражением =(0d/с) sin , где 0 - средняя частота спектра сигнала; с - скорость распространения радиоволн. Напряжение, пропорциональное рассогласованию е, выделяется на выходе коррелятора (Кор). Для узкополосного случайного процесса нормированная автокорреляционная функция
Ps() =Р0() cos0 ,
где р0 (е) - огибающая АКФ. Выражение справедливо для процессов, спектр которых симметричен относительно средней частоты 0 . Включение в один из каналов дифференцирующего устройства, формирующего производную dsс (t)/dt, позволяет получить на выходе коррелятора напряжение, зависящее от рассогласования . Таким образом, пеленгационная характеристика системы может быть выражена следующим образом:
wK(c)= p0()sin0.
Графики зависимостей приведены соответственно на рис. 8.4, а, б. В пределах линейного участка ПХ осуществляется формирование напряжения рассогласования, управляющего состоянием управляемой линии задержки (УЛЗ), которая компенсирует возникшее рассогласование е. Наличие нескольких точек устойчивого равновесия системы, обусловленное осциллирующим характером ПХ, может привести к неоднозначности измерения угла (к аномальным ошибкам). Неоднозначность устраняется применением многобазовых систем по аналогии с фазовыми пеленгаторами. Однозначную ПХ удается также сформировать, если использовать в качестве коррелируемых канальных сигналов огибающие случайных узкополосных процессов. С этой целью в каналы после УПЧ включаются детекторы огибающей. Крутизна ПХ при этом определяется величиной, обратной величине ширины спектра сигнала.
Следует отметить, что отсутствие собственного излучения делает работу пассивных РЛС скрытной и поэтому менее уязвимой по отношению к организованным помехам.