

6.4. Диспетчерские радиолокационные станции
Входящий в радиолокационную систему посадки диспетчерский радиолокатор представляет обзорную РЛС малого или среднего радиуса действия. Назначением этого радиолокатора является контроль воздушного пространства в аэродромной зоне с целью регулирования воздушного движения в этой зоне и вывода самолетов в зону действия посадочного радиолокатора.
Структура диспетчерских радиолокаторов как обзорных РЛС аналогична рассмотренным радиолокационным станциям обзора воздушного пространства большого и среднего радиуса действия. Так же как и в этих РЛС, в диспетчерских радиолокаторах широко применяются меры по их защите от пассивных помех, отраженных от земли, облаков и осадков. Для борьбы с пассивными помехами используется селекция движущихся целей и поляризационная селекция. Диспетчерские РЛС имеют выносную индикаторную аппаратуру, которая может размещаться от приемопередающей аппаратуры на расстоянии до нескольких километров. Вынос этой аппаратуры на большее расстояние не требуется, так как диспетчерские радиолокаторы размещаются на аэродроме. Часто эти станции устанавливаются на специальных башнях для улучшения условий обзора воздушного пространства.
Отличие диспетчерских радиолокаторов от обзорных РЛС большого радиуса действия в основном количественное. Дальность действия диспетчерских РЛС меньше, поэтому в них используются антенны меньших размеров и меньшая мощность зондирующих импульсов. Мощность излучаемых сигналов 200-500 кВт. Относительно небольшая дальность действия диспетчерских радиолокаторов позволяет использовать в них повышенную частоту повторения импульсов, что приводит к достаточно высокому темпу поступления радиолокационной информации.
Основные характеристики диспетчерских РЛС определяются их назначением. Международной организацией гражданской авиации разработаны стандарты и рекомендации к обзорным радиолокаторам, входящим в радиолокационные системы посадки.
Зона обзора. Диспетчерский радиолокатор должен иметь круговой обзор в горизонтальной плоскости. Зона действия в вертикальной плоскости ограничивается минимальным углом места 1,5°, максимальной дальностью действия 37 км, высотой 2400 м и далее максимальным углом места 20°. Вместе с тем имеются рекомендации по- расширению зоны обзора в вертикальной плоскости. Рекомендованная зона ограничивается минимальным углом места 0,5°, максимальной дальностью 46 км, высотой обнаружения, самолетов 3000 'м и максимальным углом места 30°.
Точность по азимуту. Ошибка индикации азимута самолетов не должна быть более ±2°.
Точность по дальности. Ошибка индикации дальности не должна превышать 5% от расстояния до самолета или 150 м., в зависимости от того, которая из этих величин больше. Рекомендовано для новых радиолокаторов снизить ошибку измерения дальности до 3% от расстояния или 150 м в зависимости от того, какая из этих величин больше.
Разрешающая способность по азимуту не должна быть хуже 4°.
Разрешающая способность по дальности должна обеспечивать возможность раздельного изображения двух самолетов, находящихся друг от друга на расстоянии 1% их удаления от радиолокатора или 230 м, в зависимости от того, которая из этих величин больше.
В качестве примера рассмотрим диспетчерский радиолокатор ДРЛ-7, входящий в радиолокационную систему посадки РСП-7.
Радиолокатор имеет двойной комплект аппаратуры, включая антенную систему, обеспечивающей 100-процентное резервирование. Конструктивно он выполнен в виде специального кузова и двух платформ. В кузове размещаются два приемопередатчика, два приемника ответа, два индикатора кругового обзора, выполняющие функцию контрольных, две УКВ радиостанции связи. На каждой платформе устанавливается антенная система с приводным механизмом на колонне и преобразователь, служащий для преобразования трехфазного переменного тока частоты 50 Гц в трехфазный переменный ток частоты 400 Гц, использующийся для питания радиолокатора. Кроме того, в комплект радиолокатора входят выносные индикаторы кругового обзора, устанавливаемые на рабочих местах диспетчеров ДПСП.
Радиолокатор ДРЛ-7 работает в длинноволновой части дециметрового диапазона на шести фиксированных частотах. Предусмотрено оперативное переключение фиксированных частот с помощью системы автоматической перестройки. Если на одной из этих частот имеются помехи, то возможен оперативный переход радиолокатора на вторую частоту.
Радиолокатор имеет три режима работы: пассивный, СПЦ (селекция подвижных целей) и активный. В пассивном режиме радиолокатор работает последовательностью одиночных зондирующих импульсов длительностью 2 мкс и частотой повторения 550 Гц. Мощность зондирующих импульсов 230 кВт. Они излучаются антенной параболического типа, имеющей луч шириной 4° в горизонтальной плоскости и 9° в вертикальной плоскости и вращающейся с частотой 10 об/мин. В этом режиме радиолокатор обеспечивает зону обзора в вертикальной плоскости, показанную на рис. 6.21 для двух различных углов наклона антенны в вертикальной плоскости. Угол наклона антенны выбирается при установке ДРЛ с учетом рельефа местности и высоты полета самолетов в районе аэродрома. Отраженные сигналы принимаются антенной, усиливаются приемником и поступают на индикаторы.
В режиме СДЦ в приемном канале станции дополнительно подключается аппаратура селекции движущихся целей, которая обеспечивает подавление пассивных помех, отраженных местными предметами и атмосферными образованиями. В активном режиме ДРЛ-7 работает как вторичный радиолокатор. Передатчик создает кодированный запросный сигнал, состоящий из двух высокочастотных импульсов длительностью 1 мкс. Частота повторения запросных сигналов 550 Гц. Запросные сигналы излучаются в пространство той же антенной, которая используется в режимах СПЦ и пассивном. На самолетах запросные сигналы принимаются ответчиком типа СОМ-64. Сигналы ответчиков, принятые антенной радиолокатора, поступают на приемник ответа, с помощью которого они усиливаются. На выходе приемника ответа имеется дешифратор координатного сигнала ответчика. После декодирования этот сигнал подается на индикаторы и создает на их экранах отметку самолета.
Радиолокатор обеспечивает подавление сигналов боковых лепестков по каналу ответа. Приемник ответа, кроме основного канала, имеет канал подавления, на который поступают сигналы, принятые слабонаправленной
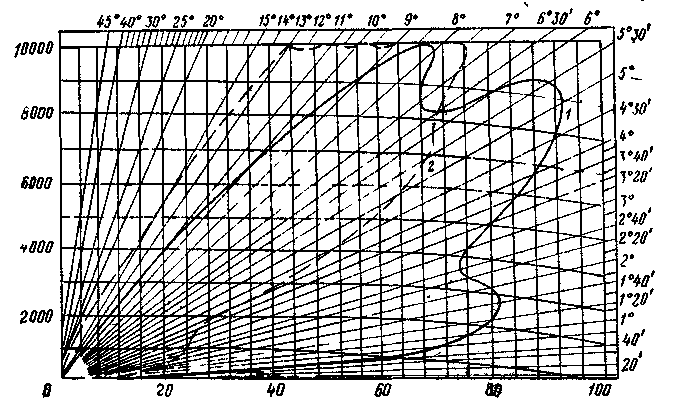
Рис.6.21. Зона обзора ДРЛ-7: 1 - при угле наклона 5, 2 - при угле наклона 9
в горизонтальной плоскости антенной подавления. В активном режиме работы благодаря использованию ответных сигналов вместо отраженных дальность действия возрастает до 150 км.
Кроме ответных сигналов, в этом режиме антенна радиолокатора принимает отраженные сигналы в виде пар радиоимпульсов. Эти сигналы после усиления в приемнике станции подаются на дешифратор и после декодирования в нем поступают на индикаторы. .Имеется возможность подавать на индикатору или только ответные сигналы, или ответные вместе с отраженными. В первом случае на индикаторах будут отображаться только самолеты, оборудованные ответчиками, а во втором - все самолеты, находящиеся в зоне действия РЛС, а также местные предметы и метеообразования..
В комплект радиолокатора входят два выносных индикатора кругового обзора, которые устанавливаются на рабочем месте диспетчера ДПСП на расстоянии до 3 км от места размещения приемопередающей аппаратуры. Сигналы на ВИКО передаются по кабелю. Для обеспечения работы выносных индикаторов от приемопередающей аппаратуры поступают следующие сигналы: запускающие импульсы, сигналы с выходов основного приемника и приемника ответа, азимутальные 10- и 30-градусные импульсы, напряжения, пропорциональные синусу и косинусу угла поворота антенны.
ВИКО имеют три масштаба развертки дальности - 45, 90 и 150 км. Координаты самолетов определяются по электронной шкале. Метки дальности следуют через 2 км (основные) и 10 км (опорные) при масштабе 45 км, а при остальных масштабах - через 10 км (основные) и 50 км (опорные). Азимутальные метки расположены через 10° (основные) и 30° (опорные). РЛС обеспечивает точность по дальности 5% от масштаба и по азимуту 1°, а разрешающую способность по дальности не хуже 1,5% от масштаба и по азимуту 4°.