

Глава 6 радиолокационные системы посадки
6.1. Общие сведения о радиолокационных системах посадки
Радиолокационные системы посадки (РСП) появились в годы второй мировой войны и использовались для точного определения положения самолета, выполняющего посадку, относительно безопасной линии планирования, обеспечивающей приземление. В процессе эксплуатации этой системы было установлено, что она обладает достаточной гибкостью для обеспечения захода на посадку любого типа самолета. После войны радиолокационные системы посадки стали использоваться в гражданской авиации для обеспечения полетов в сложных метеорологических условиях.
Радиолокационные системы посадки предназначены для управления полетом самолетов в районе аэродрома, включая их вывод в плоскость посадочного курса и осуществления захода самолетов на посадку по командам управления, передаваемым с земли, поэтому в состав РСП входит диспетчерское и посадочное оборудование.
Задачи диспетчерской службы, включая вывод самолетов в плоскость посадочного курса, решаются с помощью диспетчерского оборудования, которое состоит из диспетчерской радиолокационной станции, автоматического радиопеленгатора и командной радиостанции.
Заход самолетов на посадку по командам с земли и контроль за садящимися самолетами производится с помощью посадочного оборудования, в которое входит посадочная радиолокационная станция (ПРЛ) и командная радиостанция. Посадочный радиолокатор непрерывно определяет пространственное положение самолетов относительно линии планирования, которая задается ПРЛ. Информация о положении самолета относительно линии планирования и ВПП передается на самолет в виде команд для изменения курса, высоты и режима полета с целью стабилизации самолета на линии планирования.
Достоинство радиолокационных систем посадки по сравнению с радиомаячными посадочными системами состоит в том, что на самолете не требуется никакого специального оборудования, кроме связной радиостанции. Однако точность вывода самолета в заданную точку с помощью РСП ниже, чем с помощью радиомаячной посадочной системы. Поэтому при оборудовании аэродрома той и другой системой заход самолетов на посадку осуществляется по радиомаячной посадочной системе, а РСП используется для контроля за посадкой самолетов.
Диспетчерская РЛС представляет собой радиолокационную станцию обзора воздушного пространства среднего или малого радиуса действия и служит для сбора информации о воздушной обстановке в зоне аэродрома н для обеспечения вывода самолетов в зону действия посадочного радиолокатора. Используя диспетчерскую РЛС, диспетчер подхода определяет очередность посадки самолетов, передает на самолеты информацию, необходимую для вывода самолетов в плоскость посадочного курса.
Автоматический радиопеленгатор (АРП), как отдельное устройство, предназначен для автоматического определения пеленга самолетов. В составе РСП применяются АРП УКВ диапазона, работающие на частотах от 100 до 150 МГц. Эти пеленгаторы принимают сигналы работающих самолетных командных радиостанций на антенную систему направленного действия, и в результате их обработки индицируется пеленг самолетов. Выходной сигнал радиопеленгатора создает на экране электроннолучевого индикатора (рис. 6.1 а), световую радиальную линию, угол между которой и нулевым направлением (севером) равен пеленгу самолета. Точность определения направления на самолет с помощью АРП УКВ диапазона оценивается ошибкой порядка 3°.
Пеленгатор, входящий в состав РСП, не применяется для измерения пеленга самолетов, так как его точность хуже, чем у, радиолокационной станции, а служит только для опознавания самолетов. Для этого выходной сигнал пеленгатора подается на индикатор кругового обзора диспетчерской РЛС. При этом на индикаторе, кроме отметок, образованных сигналами радиолокатора, появляется радиальная засветка от сигнала пеленгатора (рис. 6.1, б). Эта световая линия будет ориентирована на ИКО в направлении отметки того самолета, с которым оператор станции в данный момент поддерживает радиосвязь.
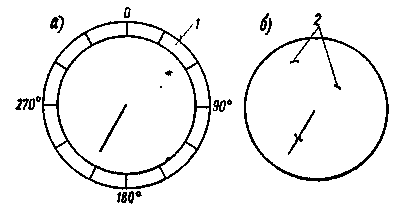
Рис. 6.1. Использование пеленгатора для определения самолета: а - экран индикатора пеленгатора, б – экран ИКО с засветкой пеленгатора, 1 – шкала пеленгатора, 2 – отметки самолетов
Это объясняется тем, что угловое положение на индикаторе отметки самолета и световой линии пеленгатора определяется одним и тем же азимутом самолета. Таким образом, на ИКО с помощью сигналов пеленгатора выделяется (опознается) один самолет из всех, находящихся в зоне действия станции, с которым диспетчер поддерживает радиосвязь и который, следовательно, его интересует в данный момент. Координаты этого самолета, так же как и других, определяются по отметкам целей, создаваемых сигналами радиолокационной станции.
Посадочная РЛС предназначена для определения отклонений самолета от линии планирования в горизонтальной и вертикальной плоскости и измерения расстояния от ПРЛ до самолетов. Используя полученную информацию, оператор посадочной РЛС (диспетчер посадки) контролирует заход самолетов на посадку и передает на самолет команды управления по командной радиостанции связи, обеспечивающие снижение самолета вдоль линии планирования до определенной высоты. Посадочные РЛС обеспечивают заход самолетов на посадку до высоты нескольких десятков метров, после чего производится визуальная посадка.
На аэродроме посадочные радиолокаторы размещаются вблизи ВПП примерно на половине ее длины и сбоку от нее на расстоянии 160- 200 м (рис. 6.2). Перед посадочной РЛС со стороны посадки на оси ВПП, вблизи от ее начала и на некотором удалении от торца ВПП размещаются уголковые отражатели, служащие для проверки
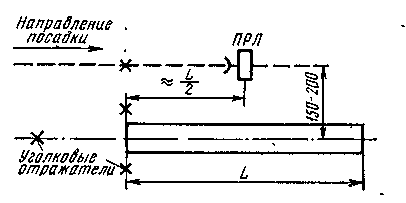
Рис 6.2. Размещение ПРЛ относительно ВПП
правильности установки ПРЛ относительно ВПП и для разметки ее индикаторов.
Одна и та же посадочная РЛС может обслуживать (но не одновременно) два направления посадки на одной и даже нескольких ВПП, расположенных близ друг от друга. Для этого перед использованием ПРЛ ее антенны ориентируются в нужном направлении с помощью уголковых отражателей. Диспетчерский радиолокатор устанавливается вблизи ПРЛ достаточно произвольно, но таким образом, чтобы он не затенял направления посадки, обслуживаемые посадочным радиолокатором.