

5.3. Принципы построения рса
Структурная схема РСА. Структурная схема практически любой РСА включает в себя пять взаимодействующих частей (рис. 5.4):
приемопередатчик,
антенную систему,
системы обработки сигналов,
управления режимами работы,
отображения радиолокационной информации.
В РСА используется когерентный приемопередатчик, позволяющий получить амплитудно-фазовое распределение отраженных сигналов. Для этого стабильные по частоте колебания с выхода задающего генератора используются как синхронизирующие колебания передатчика и опорный сигнал для приемника.
Антенная система формирует требуемую диаграмму направленности излучения и приема.
Система обработки сигналов обеспечивает перемножение принимаемых сигналов с опорными и накопление полученных сигналов в течение всего времени синтезирования апертуры. Для получения изображения объектов и местности одновременно по всей диаграмме направленности реальной антенны требуется, как правило, многоканальная система обработки по дальности (времени задержки) и азимуту (доплеровской частоте сигнала). Вид опорного сигнала для системы общих
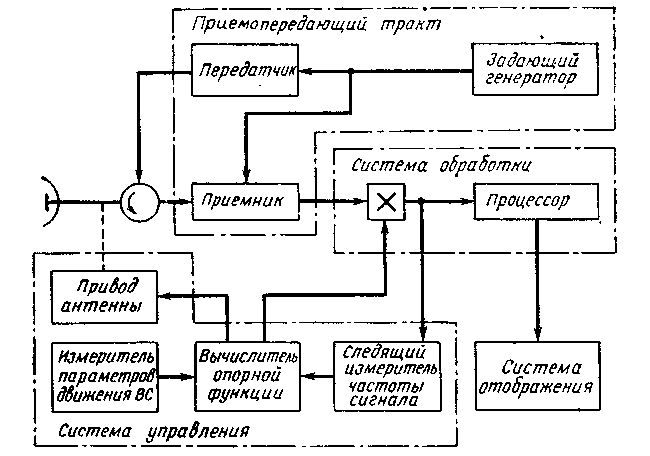
Рис. 5.4. Структурная схема РСА
сигналов, а приемник - заданную чувствительность и динамический диапазон. Для получения высокой разрешающей способности по дальности необходимо использовать широкополосный приемопередатчик. Заданная энергия сигнала обеспечивается применением внутри импульсной модуляции зондирующего импульса и его сжатием в приемнике. Жесткие требования предъявляются к амплитудной и фазовой стабильности приемопередающего тракта РСА. Если известны законы изменения амплитуды и фазы излучающих сигналов относительно сигнала гетеродина, а характеристики приемного тракта стабильны, то такой приемопередающий тракт называется когерентным. Когерентность тракта определяется постоянством частоты излучаемого сигнала и гетеродина приемника при постоянстве амплитуд этих сигналов. Реальный приемопередающий тракт вносит случайные изменения в амплитуду и фазу отраженного сигнала, т. е. является лишь частично когерентным.
В зависимости от способа обеспечения когерентного приема РЛС разделяются на два класса.
На рис. 5.5 приведена структурная схема истинно когерентной РЛС. С помощью однополосного модулятора частота колебаний задающего СВЧ генератора сдвигается на величину fпр. Импульсный усилитель обеспечивает необходимую мощность излучения. При этом зондирующие импульсы являются вырезками из синусоидального сигнала частоты f0+fпр. Из-за эффекта Доплера частота отраженных сигналов сдвинута на fд. В смесителе приемника в качестве сигнала когерентного гетеродина используются колебания задающего генератора. В результате на выходе смесителя выделяется сигнал частоты fпр + fд, а на выходе фазового детектора (ФД) формируются двухполярные видеоимпульсы, огибающая которых модулирована колебаниями доплеровской частоты.
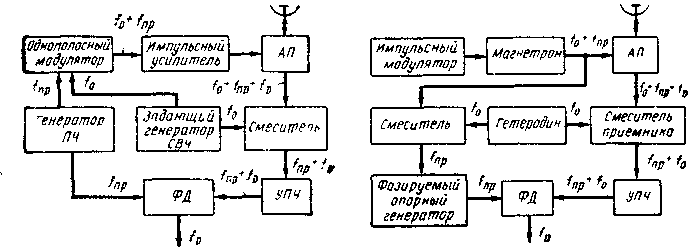
Рис. 5.5. Структурная схема Рис. 5.6. Структурная схема РСА истинно когерентной РЛС РСА когерентной РЛС
с фазированным гетеродином
На рис. 5.6 приведена структурная схема псевдокогерентной РЛС. Магнетронный передатчик формирует стабильные по частоте импульсы со случайной начальной фазой. Система обеспечения когерентности в приемном устройстве содержит высокостабильный гетеродин и фазируемый опорный генератор ПЧ (когерентный гетеродин). Для запоминания фазы излучаемого сигнала СВЧ импульс магнетрона с помощью смесителя и гетеродина преобразуется в импульс ПЧ и используется для фазирования опорного генератора ПЧ. Этим достигается равенство фаз излучаемого и опорного колебаний в каждом периоде повторения импульсов. Сравнение принятого и опорного сигналов в ФД позволяет выделить сигнал доплеровской частоты.
В момент излучения импульса часть его мощности ответвляется и проходит через тракт приемника. На выходе ФД формируются видеосигналы (амплитуда и начальная фаза излучаемого сигнала относительно сигнала гетеродина). С помощью аналого-цифрового преобразователя (АЦП) эти видеосигналы превращаются в цифровые сигналы и запоминаются на время одного периода повторения до момента излучения следующего зондирующего импульса.
Система обработки сигналов РСА. Задача обработки сигналов в РСА является одной из наиболее сложных из-за жестких требований, предъявляемых:
к объему обрабатываемой информации,
быстродействию,
ширине полосы частот входных сигналов,
времени накопления сигналов и др.
Система обработки сигналов должна обеспечивать когерентное накопление сигналов, т. е. накопление с учетом их фазы. При этом погрешность согласования фазовых характеристик системы обработки и сигнала не должна превышать нескольких градусов.
Для обеспечения нужной полосы обзора требуется многоканальная система обработки. Число каналов по дальности N достигает нескольких тысяч. Объем памяти системы обработки сигналов определяется числом когерентно-суммированных сигналов. В каждом канале по дальности число сигналов зависит от времени синтезирования и частоты повторения импульсов Fn. Так при Ра = = 1 кГц число суммируемых сигналов Nс = ТСРП= 1,3-103. Каждый сигнал содержит амплитудную и фазовую информацию. При этом обычно используется динамический диапазон сигнала порядка 100. Таким образом, емкость памяти системы обработки сигналов должна быть около 108 двоичных единиц при числе каналов 103 ... 104.
Быстродействие системы обработки сигналов должно быть достаточно высоким, чтобы получить радиолокационное изображение в реальном масштабе времени, т. е. по мере пролета местности. Оно оценивается для рассматриваемого примера значением 109 ...1010 операций в секунду. Для увеличения скорости обзора и некогерентного накопления изображений желательна одновременная обработка сигналов от всех объектов, разнесенных по азимуту. Это, в свою очередь, требует многоканальной обработки по азимуту. При этом требования к быстродействию еще более возрастают. Важнейшим требованием является требование минимизации задержки получения информации. Существуют три принципиальные причины, вызывающие задержку получения изображения на экране индикатора после начала работы (излучения сигнала) РСА.
Первая причина связана с необходимостью формирования требуемого углового размера синтезированной аппаратуры. Минимальная начальная задержка равна времени синтезирования Тс, которое уменьшается с ростом скорости ВС.

Рис. 5.7. Структурная схема РСА с оптимальной системой обработки
Вторая причина состоит в том, что требуется иметь изображение не только отдельного объекта, но и заданного участка местности по путевой дальности - Х. Время задержки, очевидно, будет TХ = Х NП. Указанные причины обусловливают задержку информации от десятых долей до единиц секунд.
Третьей причиной задержки является конечное время выполнения операций в системе обработки сигналов, которое в сильной степени зависит от вида системы обработки и может достигать (в оптической системе) нескольких часов.
Реализовать рассмотренные требования к системе обработки весьма сложно. Удачным выходом из этой ситуации является возможность использования для обработки радиолокационных сигналов оптических когерентных систем, которые обладают большими возможностями и имеют ряд преимуществ по сравнению с известными методами обработки сигналов электронными системами как цифровыми, так и аналоговыми.
Оптические системы позволяют достаточно просто решать задачу когерентной многоканальной обработки радиолокационных сигналов. В оптической системе (рис. 5.7) радиолокационные сигналы с выхода приемника поступают в преобразователь, которые превращает их в световые сигналы на входной (предметной) плоскости оптической системы. Оптический процессор производит обработку световых сигналов, образуя выходное изображение. Преобразователь выходных сигналов, используя выходное изображение, формирует электрические сигналы для передачи их в систему отображения.
Когерентная аналоговая оптическая система в отличие от электронной позволяет в одном устройстве выполнить комплексный двумерный алгоритм обработки.
Аналогом радиолокационного сигнала на входе оптической системы служит модулированный по пространству пучок света - пространственный сигнал, который представляется двумерным распределением амплитуд и фаз на входной плоскости.
Использование во входном преобразователе для записи радиолокационных сигналов фотопленки позволяет достаточно просто обеспечивать требуемую емкость памяти системы обработки сигналов при необходимом числе каналов. Так. один кадр стандартной кинопленки (24x36 мм2) позволяет записать 108 двоичных единиц информации при числе каналов более 103. Вследствие высокой разрешающей способности оптические системы могут одновременно обрабатывать большой объем информации (рис. 5.8).
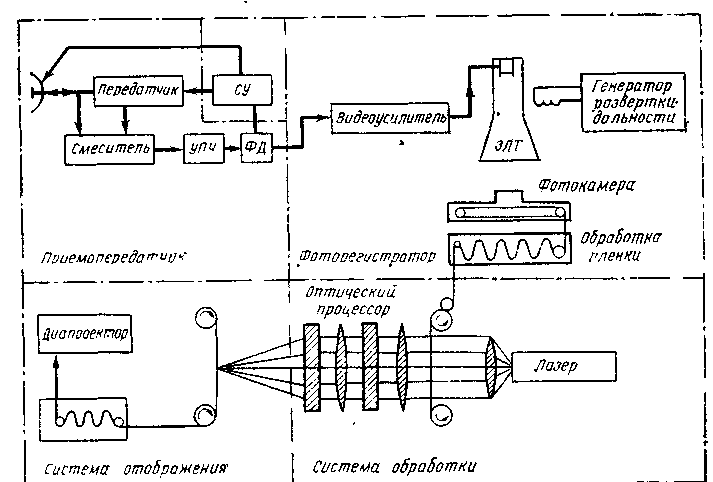
Рис.5.8. Структурная схема РСА, с оптической системой обработки.
При импульсной работе передатчика принимаемые сигналы после их усиления в УПЧ преобразуются в видеоимпульсы и с выхода ФД поступают на видеоусилитель устройства запоминания сигналов оптической системы обработки. В качестве памяти используется фоторегистратор, в котором видеосигналы модулируют яркость свечения экрана ЭЛТ с разверткой луча по дальности. Световые сигналы фиксируются фотокамерой на непрерывно протягиваемую фотопленку. После фотохимической обработки на пленке образуется изображение траекторных сигналов. В когерентном оптическом процессоре первичная фотопленка с изображением тракторных сигналов освещается лучом лазера. В результате прохождения параллельного пучка света через фотопленку (транспарант) происходит пространственная модуляция света, и на входной плоскости оптической системы формируется изображение транспаранта -аналог траекторного сигнала. Пространственно-модулированный пучок света, проходя через ряд диафрагм оптической системы, формирует на выходе световое изображение - аналог синтезированного радиолокационного изображения местности и объектов в пределах луча реальной антенны РСА. Полученное изображение регистрируется вторичной фотопленкой, которая после фотохимической обработки просматривается с помощью диаплектора.
Задержка информации в оптической системе в основном определяется быстродействием системы памяти, так как сама оптическая система выполняет заданный алгоритм практически мгновенно. Однако реальным оптическим системам присуща очень большая задержка информации из-за использования в качестве системы памяти фоторезисторов с фотохимической обработкой пленки.
Размещение на борту ВС и эксплуатация когерентной оптической системы, имеющей значительные размеры и чувствительность к вибрациям, представляет значительные и даже принципиальные трудности. Вследствие этого в настоящее время когерентные оптические системы обработки сигналов РСА используются в основном в наземных условиях. Зарегистрированный на фотопленке на борту ВС - носителя РСА или в наземной системе траекторный сигнал после передачи по каналу связи поступает в наземную оптическую систему обработки. На ее выходе формируется результат обработки траекторного сигнала - радиолокационное изображение, которое регистрируется вторичной планкой и поступает в систему отображения.
Цифровая система обработки (ЦСО) используется прежде всего в тех случаях, когда необходимо обеспечить получение радиолокационного изображения местности непосредственно на борту ВС с минимальной задержкой во времени.
Видеосигналы с выхода ФД (рис. 5.9) в каждом периоде повторения подвергаются дискретизации во времени и квантованию
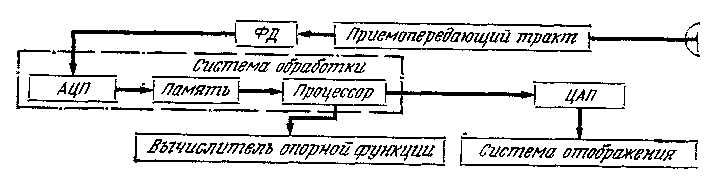
Рис. 5.9. Структурная схема РСА с аналоговой электронной системой обработки
по амплитуде и преобразуются в цифровые сигналы с помощью быстродействующих АЦП. Полученные данные от всех разрешаемых элементов в зоне обзора по дальности запоминаются на участке траектории, равном синтезированной апертуре, на время выполнения алгоритма обработки. Процессор осуществляет обработку цифровых сигналов, хранящихся в памяти и поступающих из вычислителя опорной функции. Алгоритм процессора определяется алгоритмом обработки траекторного сигнала при синтезировании апертуры, а также при сжатии сигнала по дальности. Вычислитель опорной функции снабжает процессор требуемыми опорными сигналами для данного алгоритма обработки. В результате на выходе процессора формируется массив цифровых сигналов, соответствующих амплитуде или мощности сигналов, отраженных от каждого разрешаемого элемента в зоне обзора РСА, т. е. цифровое изображение местности и объектов. Цифроаналоговый преобразователь (ЦАП) вырабатывает из цифровых электрические аналоговые сигналы и подает их в систему отображения.
Требования к быстродействию ЦСО, а также к вычислителю опорной функции зависят не только от параметров РСА, но и от способа выполнения алгоритма обработки процессором. При этом параметры РСА при использовании ЦСО с приемлемыми для бортовых систем габаритами, потреблением энергии и стоимостью в значительной степени определяются характеристиками интегральных микросхем систем памяти и процессора.