

19.Структурная схема рлс «градиент-154».
В полный комплект РЛС наряду с другими устройствами входят два приемопередающих блока (рабочий и резервный) и два индикаторных размещаемых на рабочих местах первого и второго пилота.
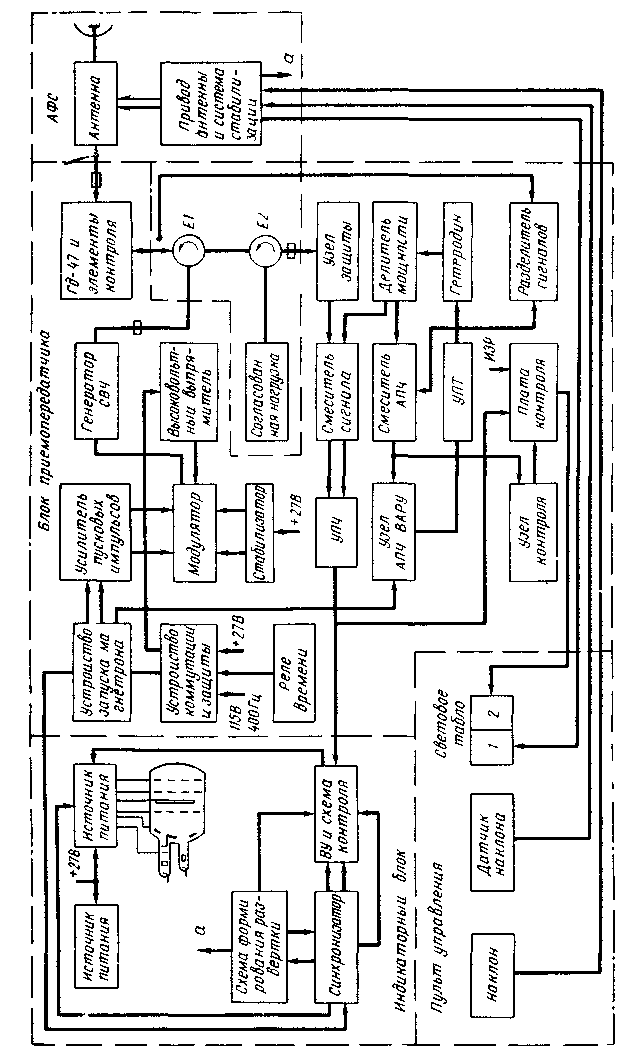
Рис. 4.5. Структурная схема РЛС «Градиент - 154»
По своему схемному и конструктивному исполнению приемопередающие блоки идентичны, аналогично идентичны и индикаторные блоки. Поэтому на структурной схеме РЛС, приведенной на рис 4.5, для упрощения изображено по одному блоку приемопередатчика и индикатора. Кроме того, с этой же целью не приводятся вторичные источники питания и опущены некоторые второстепенные связи.
По сравнению с метеонавигационной РЛС «Гроза» в данном радиолокаторе имеются следующие основные схемные и конструктивные отличительные особенности:
двухимпульсный запуск передатчика, при котором длительность модулирующего импульса формируется отсечным методом, что обеспечивает требуемую крутизну ею спада,
преобразователь тракта сигнала выполнен по схеме двоичного балансного смесителя с использованием энергии зеркального канала,
индикатор выполнен на базе ЭЛТ с накоплением,
применена встроенная система контроля, обеспечивающая оценку полной работоспособности радиолокатора и определение неисправного блока без использования какой-либо контрольно-поверочной аппаратуры.
Радиолокатор работает по принципу излучения мощных СВЧ зондирующих импульсов в узком секторе пространства, приема и усиления отраженных от наземных или воздушных объектов сигналов и их яркостной индикации на экране накопительной ЭЛТ.
Синхронизация работы РЛС осуществляется импульсами узла запуска модулятора с частотой 200 Гц. Пусковые импульсы поступают на передающее устройство и на синхронизатор для запуска устройства развертки и выработки масштабных меток дальности.
Одноканальный тиристорный модулятор формирует высоковольтные импульсы с длительностью 2 или 5 мкс в зависимости от выбранного масштаба развертки. Эти импульсы поступают на коаксиальный магнетрон, генерирующий СВЧ колебания, которые через антенный переключатель, волноводный тракт и вращатель плоскости поляризации подаются в антенну и излучаются в пространство.
Ферритовый вращатель плоскости поляризации осуществляет изменение плоскости поляризации высокочастотных колебаний, что обеспечивает создание антенной ДН в виде игольчатого или веерного луча. Отраженные от радиоконтрастных объектов сигналы принимаются антенной и по волноводному тракту через антенный переключатель и устройство защиты приемника поступают на вход смесителя тракта сигнала. Сюда же поступают колебания гетеродина. Причем на смесители тракта сигнала через делитель мощности поступают две трети мощности колебаний гетеродина. Одна треть мощности подается на смеситель АПЧ. После преобразования импульсы промежуточной частоты поступают на основной УПЧ, имеющий линейно-логарифмическую амплитудную характеристику. Полоса пропускания УПЧ составляет 0,6 МГц. Временная автоматическая регулировка усиления в УПЧ осуществляется только в режиме «Контур». Устройство автоматической подстройки частоты (АПЧ) - двухканальное, разностное, непрерывно-ищущего типа, обеспечивает постоянство значения промежуточной частоты, равной 30 МГц, путем подстройки частоты гетеродина. Гетеродин собран на базе минитрона типа КС-5-А. На схему АПЧ подается стробирующий импульс длительностью 1 мкс, что обеспечивает ее работу при установившейся частоте магнетрона. С выхода УПЧ видеосигнал подается на видеоусилитель, который в режимах «Земля» и «Метео» имеет трехтоновую амплитудную характеристику, а в режиме «Контур» ступенчатую. Для получения трехтонового изображения на экране индикатора и предотвращения насыщения сигнал фона заполняется прямоугольными импульсами, не синхронными с импульсами запуска развертки. В индикаторном блоке применена ключевая схема формирования напряжения развертки с плавно регулируемой длительностью и положительной обратной связью для компенсации нелинейности. В синхронизаторе формируются калибрационные метки дальности. Расстояние между метками меняется в зависимости от длительности развертки, а его значение индицируется на световом табло, расположенном на передней панели блока. Кроме того, синхронизатор вырабатывает импульсы подсвета, импульсы стирания изображения, сигналы управления цифровым табло меток дальности и собственный импульс запуска развертки при проверке работоспособности индикаторного блока при неисправности приемопередающего блока.
Время сохранения изображения на экране накопительной ЭЛТ составляет 5 с. Нажимая кнопку «Стирание», расположенную на передней панели индикаторного блока, оператор может осуществить быстрое стирание изображения. При нажатии клавиши «Ночь» на пульте управления яркость изображения уменьшается примерно вдвое.
Схема электромеханического управления антенной обеспечивает азимутальное сканирование зеркала антенны и непрерывное совмещение оси ДН с плоскостью горизонта или любой другой заданной плоскостью при кренах и тангажах самолета. Конструктивно антенная система РЛС выполнена в основном подобно антенному блоку РЛС «Гроза».