

4.3.2. Особенности построения рлс «гроза-86».
Назначение РЛС «Гроза-86» такое же, как и у всех радиолокаторов этой серии. Некоторое увеличение дальности действия по сравнению с предшествующими РЛС обусловлено пониженной скоростью обзора пространства, а следовательно, большим количеством накапливаемых импульсов и улучшенными характеристиками накопителя, в качестве которого используется потенциалоскоп.
Следует отметить, что общая функциональная схема радиолокатора идентична схеме, представленной на рис. 4.1, но имеет некоторые конструктивные различия в части построения индикаторного блока, приемопередатчика и антенного блока.
В режиме «Земля» на масштабе 50 - 250 км до дальности 140 км обзор земной поверхности осуществляется веерной ДНА. При увеличении дальности более 140 км производится черестактный (поочередный) обзор веерной и узкой ДНА. Переключение режимов обзора производится автоматически с помощью кулачкового механизма, связанного с азимутальной осью вращения блока ГР1Б, переключающего напряжение питания ферритового вращателя плоскости поляризации.
Остановимся несколько подробнее на принципах построения индикаторного блока радиолокатора ГР4-НВЛ, имеющего существенные различия в схеме и конструкции. Они вызваны использованием в качестве индикатора потенциалоскопа, имеющего плавный масштаб развертки на дальностях 20 - 250 км и в соответствии с этим изменяющимся количеством калибрационных меток, следующих через 50 км. На фиксированном масштабе 375 км калибрационные метки следуют через 100 км.
Электрическая функциональная схема индикатора ГР4-НВЛ приведена на рис. 4.4. Индикатор ГР4-НВЛ состоит из следующих функционально законченных узлов: узла синхронизации и усиления видеосигналов У1, низковольтного источника питания У2, узла развертки УЗ, узла стирания, узла питания развертки и коллиматора У5, узла питания записывающего прожектора У6, высоковольтного источника питания У7, механизма управления наклоном антенны У8, узла регулировки видеосигнала У9.
Создание на экране запоминающей ЭЛТ (ЗЭЛТ) радиально-секторной развертки с фиксированным и плавно изменяющимся масштабом по дальности осуществляется генератором развертки. Во время рабочего хода развертки на генератор развертки поступает импульс дальности, вырабатываемый в узле синхронизации и усиления видеосигналов У1.
Формирование радиально-секторной развертки основано на модуляции линейно нарастающего тока в обмотках отклоняющей системы по закону синуса и косинуса текущего угла поворота ротора ВТ, синхронно вращающегося с антенной системой.
Плавное изменение масштаба осуществляется изменением скорости нарастания тока в роторной обмотке ИВТ. Это достигается изменением напряжения питания схемы развертки с помощью регулятора «Масштаб».
Узел синхронизации и усиления видеосигналов У1 выполняет функции формирования импульсов дальности, подсвета калибрационных меток дальности и функции усиления видеосигналов. Синхронизатор запускается старт-импульсом и вырабатывает импульс дальности и подсвета. Импульс дальности запускает генератор развертки и управляет генератором меток, вырабатывающим калибрационные 50-или 100-километровые метки дальности в зависимости от масштаба С выхода генератора меток метки поступают на регулятор «Метки» и далее в видеоусилитель для смешивания с видеосигналом. Со схемы формирования импульсов в видеоусилитель поступает импульс подсвета прямого хода развертки, задержанный относительно запускающего старт-импульса от 10 до 13 мкс для гашения луча в начале развертки.
Видеосигнал, поступающий в блок из приемопередатчика ГР2БМ, подается на узел регулировки видеосигнала У9, а затем в видеоусилитель. В узле У1 видеосигнал усиливается и смешивается с калибрационными метками дальности, прямоугольным импульсом подсвета и пилообразным импульсом дальности, служащим для выравнивания яркости свечения экрана по дальности. Регулятор «Запись» позволяет в широких пределах изменять амплитуду выходного видеосигнала, поступающего через узел питания записывающего прожектора У6 на катод ЭЛТ. Регулятор «Контраст» позволяет изменять порог выделения цели.
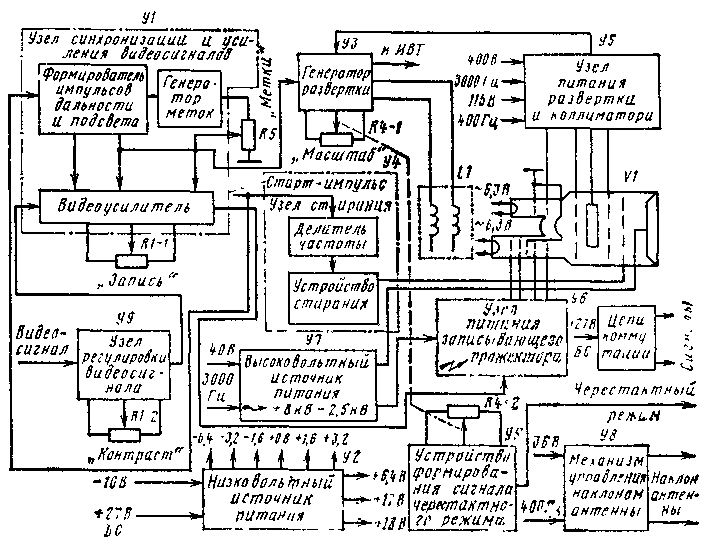
Рис.4.4.Электрическая функциональная схема индикатора ГР4-ВЛ.
Узел стирания У4 служит для деления частоты запускающих старт-импульсов при работе с плавно изменяющимся масштабом и изменения времени сохранения изображения видеосигналов и калибрационных меток дальности на экране ЗЭЛТ.
Схема стирания формирует стирающие импульсы с регулируемой длительностью, поступающие на мишень ЗЭЛТ.
При работе в режиме «Земля» для увеличения дальности наблюдения изображений используется черестактный обзор земной поверхности, который обеспечивается схемой формирования сигнала черестактного режима У5.
В блоке используются низко- и высоковольтные источники питания. Высоковольтный источник питания У7 формирует из переменного напряжения 40 В 3000 Гц постоянное напряжение 8 кВ для питания анода ЗЭЛТ и напряжение 2,5 кВ для питания записывающего прожектора. Для питания коллиматорной системы и электродов воспроизводящего прожектора используется источник +40 В.
В конструкции индикаторного блока широкое применение наряду с транзисторами нашли интегральные микросхемы.