

18.1.Метеонавигационная рлс «гроза-м».
Основным отличием «Грозы-М» является введение нового режима работы «Контроль», с помощью которого осуществляются проверка работоспособности, индикация максимальных амплитуд сигналов в направлении каждого курсового угла в режиме «Метео», использование подавления шумовых сигналов и сигналов радиолокаторов других самолетов. В этой станции используется плавный масштаб развертки изображения от 10 до 375 км дальности. При этом интервалы между калибрационными метками дальности составляют величину 25 км между первыми четырьмя метками и 100 км между остальными метками. Режим «Контроль» обеспечивается встроенной системой контроля
Радиолокационная станция «Гроза-М» может устанавливаться на различных типах самолетов и в зависимости от этого используется та или иная комплектация блоков. Рассмотрим состав этой РЛС на самолете ТУ-154, т е. модификацию «Гроза-М-154»
В состав РЛС входят следующие блоки:
антенный 1БМ; приемопередающий 2БМ;
индикаторный 430;
управления и формирования развертки 452;
стабилизации и управления 720;
волноводный коммутатор, осуществляющий подключение к антенне одного из двух приемопередатчиков, работающего с включенным высоким напряжением 47;
коммутационная коробка 17.
Функциональная схема радиолокатора представлена на рис. 4.2 Сопоставление функциональных схем РЛС «Гроза» (рис. 4.1) и «Гроза-М» (рис. 4.2) показывает их незначительное различие. Поэтому остановимся на построении функциональной схемы «Грозы-М» коротко, акцентируя внимание на различиях в построении этих станций.
Синхронизация работы передающего канала радиолокатора осуществляется частотой 400 Гц питающей сети. Магнитно-тиристорный модулятор формирует высоковольтные импульсы, поступающие на магнетрон. СВЧ импульсы магнетрона через циркулятор и ферритовый вращатель плоскости поляризации передаются на облучатель антенного блока. При работе радиолокатора в режиме «Земля» на масштабах менее 200 км обзор земной поверхности осуществляется косекансной ДНА вида соsес2 соs /соsес2 , соs 0 при горизонтальной поляризации излучаемых колебаний.
На масштабах 200 - 300 км обзор земной поверхности для повышения дальности наблюдения фона промышленных центров производится поочередно веерной и узкой ДНА, переключаемыми автоматически изменением поляризации излучаемых колебаний на горизонтальную (при движении отражателя антенны влево) и на вертикальную (при движении отражателя вправо). Из-за большого послесвечения экрана индикатора радиолокационные изображения от узкого и веерного лучей воспринимаются оператором радиолокатора как единое целое. При работе на масштабах более 300 км для получения наибольшей дальности наблюдения обзор осуществляется узким лучом.
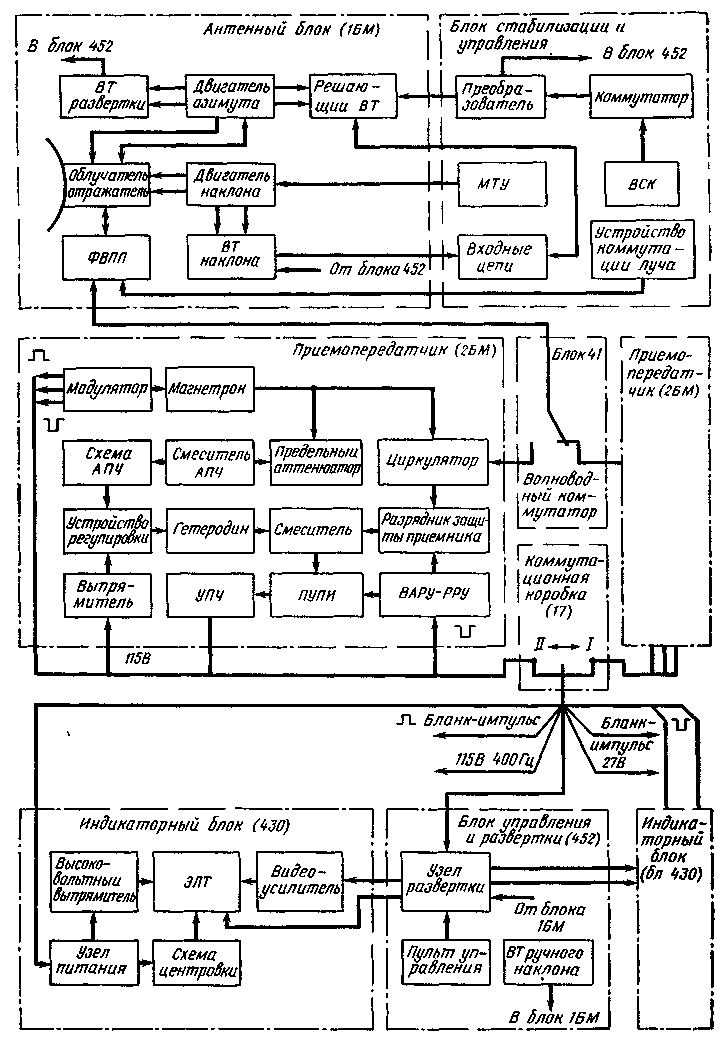
Рис.4.2. Функциональная схема РЛС «Гроза-М».
Для обеспечения быстрого переключения ДНА цепь питания вращателя плоскости поляризации коммутируется электронным способом, а не с помощью реле, как это имеет место в РЛС «Гроза».
Отраженные от радиоконтрастных целей сигналы, принятые антенным блоком через циркулятор, вентиль и разрядник защиты приемника, поступают на балансный смеситель канала сигнала На второй вход смесителя поступает СВЧ сигнал от гетеродина, выполненного на ЛОВ После преобразования импульсы промежуточной частоты поступают в ПУПЧ, а затем в УПЧ, где происходят основное усиление сигнала и его детектирование. Регулировка усиления приемного канала по выбранному закону осуществляется узлом ВАРУ - РРУ
Автоматическая подстройка частоты гетеродина осуществляется с помощью двухконтурной системы АПЧ, отличающейся от прототипа некоторыми особенностями построения принципиальной схемы: заменой нувистора, установленного после пикового детектора в «Грозе» на полевой транзистор, использованием операционного усилителя в схеме сравнения, вырабатывающей напряжение, пропорциональное разности между опорным напряжением и напряжением, пропорциональным выходному напряжению частотного дискриминатора. Напряжение с выхода операционного усилителя регулирует напряжение стабилизатора, изменение выхо которого подается для управления частотой гетеродина. В РЛС «Гроза» используется автоматический захват частоты гетеродина системой АПЧ, в процессе которого осуществляется медленное изменение напряжения на управляющем электроде ЛОВ от меньшего значения к большему до момента наступления захвата.
Наиболее существенным отличием РЛС «Гроза-М» является отображение на индикаторе информации о максимальной величине отраженного сигнала в каждом азимутальном направлении с количественной оценкой степени опасности, а также наличие схемы защиты от помех В соответствии со своим назначением индикаторный блок состоит из следующих функциональных узлов: электронно-лучевой трубки; стабилизированного источника высокого дного напряжения напряжения 18 кВ; устройства питания схемы сдвига центра развертки; видеоусилителя; узла помехозащиты.
В радиолокаторе используется так же, как в РЛС «Гроза», ЭЛТ 14ЛМ1Н, поэтому напряжения питания и амплитудные характеристики при работе в режимах «Земля», «Метео», «Контур» аналогичны характеристикам предыдущих модификаций, хотя реализуются эти характеристики с помощью устройств, выполненных на интегральных микросхемах.
Остановимся несколько подробнее на формировании характеристик видеоусилителя в режиме «Метео», так как именно в этом режиме введена индикация опасных направлений и приняты меры для повышения помехозащиты.
Функциональная схема видеоусилителя и узла помехозащиты в режиме «Метео» представлена на рис. 4.3.
Узел помехозащиты обеспечивает защиту от импульсных помех, которые создаются другими радиолокаторами, длительность импульсов которых меньше, чем длительность импульсов отраженных от протяженных метеообразований.
Схема работает следующим образом. Видеосигнал с выхода детектора приемника поступает через согласующий каскад 1 на входы ключа 2 и коммутатора 7. Ключ 2 пропускает видеосигнал на вход пикового детектора 3 только при наличии разрешающего сигнала со схемы управления 10. Коммутатор 7 формирует стандартный по амплитуде сигнал при превышении видеосигналом уровня опорного напряжения, значение которого выбирается несколько большим уровня шумов приемника. Сигнал с выхода компаратора задерживается в регистре сдвига 8 на время 4 ... 5 мкс и, пройдя через схему управления 10, открывает ключ 2. Тактовые импульсы сдвига вырабатываются генератором импульсов сдвига. Таким образом, на вход пикового детектора 3 поступают сигналы лишь в том случае, если их длительность превышает время задержки в регистре сдвига 8.
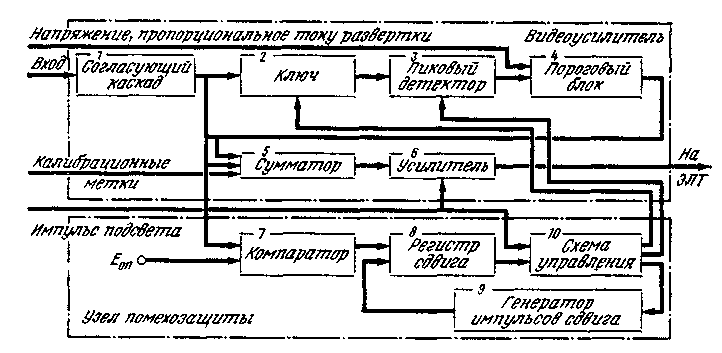
Рис. 4.3. Функциональная схема видеоусилителя и узла помехозащиты РЛС «Гроза М-154» в режиме «Метео»
В пиковом детекторе 3 запоминается максимальная амплитуда сигнала в двух соседних периодах повторения зондирующих импульсов. Величина напряжения, снимаемого с пикового детектора, преобразуется в пороговом блоке 4 в длительность импульса постоянной амплитуды путем сравнения с пилообразным напряжением, пропорциональным току развертки. Импульсы с порогового блока 4 длительностью пропорциональной интенсивности сигнала в данном периоде следования замешиваются в сумматоре 5 с калибрационными метками и видеосигналом с выхода согласующего каскада и через усилитель поступают на катод ЭЛТ.
На экране индикатора отображены форма и расположение метеообъектов, а также информация о максимальной амплитуде сигнала, отраженного от метеообъекта в направлении каждого азимутального угла. Так как амплитуда сигнала за период повторения пропорциональна максимальной радиолокационной отражаемости метеообъекта, которая, в свою очередь, связана со скоростью турбулентных потоков в облаке, по изображению на экране оценивается грозоопасность в различных направлениях полета.
Для количественной оценки степени опасности на защитное стекло экрана ЭЛТ нанесена контрольная риска, расстояние от которой до начала развертки соответствует предельной амплитуде входного сигнала.
Схема управления 10 (см. рис. 4.3) осуществляет сброс напряжения пикового детектора 3 после окончания каждого второго импульса подсвета, а также закрывает ключ 2 при отсутствии импульса подсвета для предотвращения поступления на вход пикового детектора сигналов от метеообразований, расположенных за пределами отображаемой зоны по дальности. Таким образом, анализу по степени опасности подвергаются лишь отображаемые на экране метеообразования.
Особенностью радиолокатора является также наличие нового режима работы «Контроль». Этот режим обеспечивается весьма несложной системой встроенного контроля, позволяющей производить контроль работоспособности каналов индикации, приемного и передающего, гиростабилизации.
В режиме «Контроль» команда (27 В) из блока управления и формирования развертки поступает в блок стабилизации и управления, в котором при этом отключаются цепи подачи напряжений, пропорциональных крену и тангажу, а вместо них подключается выход устройства формирования контрольных напряжений крена и тангажа. Сигнал отработки каналом гиростабилизации контрольных напряжений сравнивается на амплитудных дискриминаторах с эталонными сигналами. Выходы амплитудных дискриминаторов подключаются на входы видеоусилителей индикаторов для индикации сигналов контроля канала гиростабилизации, при нормальной работе которого на экране индикатора высвечиваются три сектора шириной (15±10)° на азимутах 270, 0 и 90°. В режиме «Контроль» в блоке управления и формирования развертки включается генератор контрольных старт-импульсов, запускающих схемы формирования развертки, импульсов подсвета, меток дальности, а также включающих питание индикаторных блоков.
Контрольные старт-импульсы опережают импульсы передатчика и поэтому импульсы передатчика индицируются на экране электроннолучевой трубки, свидетельствуя о работоспособности приемопередающего канала.
Нормальное функционирование индикаторных блоков в режиме самоконтроля свидетельствует о работоспособности канала индикации.