

13.Радиолокационный комплекс «иртыш»
РЛК «Иртыш» предназначен для определения координат ВС и получения дополнительной информации при работе с ВС, имеющими бортовой ответчик.
В его состав входят первичная РЛС «Нарва» и встроенный вторичный радиолокатор «Корень АС». РЛК «Иртыш» может использоваться в АС ОВД (входит в состав аэродромной АС ОВД «Старт») и в неавтоматизированных системах ОВД. В случае трансляции информации по узкополосной линии связи сигналы проходят предварительную обработку в АПОИ.
Общими для обоих каналов являются механизм привода антенны, датчик угловых меток, синхронизатор, а также устройства управления и контроля. При переходе с основной антенны кругового обзора на резервную работает только РЛС «Нарва». Питание осуществляется от трехфазной сети переменного тока с напряжением 220/380 В и частотой 50 Гц или от резервного источника питания через преобразователь ВПЛ-30, позволяющий получить напряжение 220 В 400Гц.
Антенна ВРЛ «Корень» устанавливается на основной антенне РЛС «Нарва». Максимумы диаграмм направленности в азимутальной плоскости совмещены.
Упрощенная структурная схема РЛС «Иртыш» приведена на рис. 3.4. Первичный радиоканал имеет два канала парных импульсов (ПИ) и СДЦ. В состав РЛС входит также резервный передатчик, работающий на эквивалент антенны Передатчик канала ПИ, носящего, кстати, условное название, определенное тем фактом, что первые РЛС типа ОРЛ-А формировали самостоятельно сигналы активного канала, работает в режиме одиночных импульсов с частотой повторения. 500 Гц, а передатчик канала СДЦ - с переменной частотой повторения 1250, 833 и 100 Гц.
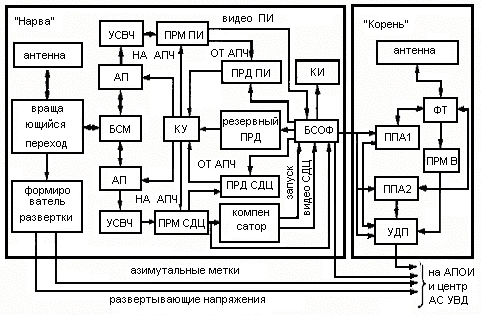
Рис. 3.4. Упрощенная структурная схема РЛС «Иртыш»
Импульсная мощность передатчика равна 15 кВт. В передающих устройствах применена АПЧ по стабильному гетеродину приемного тракта.
Антенна РЛС имеет зеркало двойной кривизны с раскрывом 7х 14 м. Вертикальный раскрыв 7 м обеспечивает нужную крутизну нижней кромки ДН. Коэффициент усиления антенны на частотах канала ПИ равен 1300 при уровне потерь мощности 1 %.
Фидерный тракт служит для фильтрации, коммутации и обеспечения одновременно работы двух приемопередатчиков с разнесенными частотами на один облучатель.
Приемное устройство ПРК выполняет функции усиления и преобразования эхо-сигналов и сигналов, необходимых для функционирования систем АПЧ и СДЦ. В приемнике пассивного канала предусмотрена ВАРУ, исключающая перегрузку приемника при обработке сигналов высокого уровня, т. е. сигналов, отраженных от местных предметов и ВС, находящихся на небольшом удалении от РЛС.
В приемном устройстве канала СДЦ используется однократная череспериодная компенсация сигналов от неподвижных объектов. Чувствительность приемных устройств составляет 1 ... 28 дБ/Вт, уровень нескомпенсированных при СДЦ сигналов от местных объектов- не более 10 %.
Входные сигналы вместе с незадержанными сигналами подаются после задержки на период повторения на схему совпадения, которая отпирается только синхронным сигналом.
Кроме этого, блок синхронизации, обработки и фазирования (БСОФ) формирует импульсы, синхронизирующие работу всей РЛС, причем блок запуска работает в режиме синхронизации от компенсатора. Совмещенный режим работы ПРЛ и ВРЛ обеспечивается задержкой синхроимпульсов по отношению к ЗИ на 84 мкс для канала ПИ и на 90 мкс канала СДЦ.
Вторичный радиолокатор имеет два режима «ОВД» и четыре режима запроса «RBS», последовательность чередования которых может определяться дистанционно. Антенна вторичного канала расположена на антенне первичного канала, причем максимумы ДНА совмещены. В состав фидерного тракта входят фильтры и коммутирующие элементы, обеспечивающие работу приемопередающих антенн. Работа в режиме «RBS» поддерживается двумя комплектами антенн, частоты и сигналы которых соответствуют международному стандарту. Импульсная мощность передатчиков ВРЛ равна 20 кВт, динамический диапазон подавления боковых лепестков составляет 50 дБ по запросу и 70 дБ по ответу, чувствительность приемников - 110 дБ/Вт. Чередование запросов одинарное, двойное и тайное. Сигналы с выходов приемников декодируются, очищаются от помех и преобразуются в цифровую форму.
Оценка функционального состояния РЛК осуществляется с помощью аппаратуры встроенного контроля, реализующей принцип сквозного допускового контроля. Передающие устройства контролируются в соответствии с принципом непрерывного измерения и анализа импульсной мощности и среднего тока генератора СВЧ, а приемное устройство на основании оценки коэффициента шума. Компенсатор нейтрализуется по величине некомпенсированного остатка при прохождении контрольного тест-сигнала через компенсатор, а состояние блока запуска оценивается по минимуму оценки амплитуды ЗИ на выходе блока.