

3.3. Трассовый и аэродромный радиолокаторы atsr-22 и atsr-44
Радиолокационные станции ATSR-22 и ATSR-44 фирмы «Селения» входят в состав АС ОВД «ТЕРКАС». Вместе с ними используются ВРЛ типа «Корень АС», сдвоенный комплект АПОИ, а также устройства трансляции сигналов по узкополосным линиям связи СН-1054.
В состав оборудования РЛС входят антенная система, блоки передатчика и приемника-процессора, оборудования питания, контроля и управления. Все блоки резервированы, что дополнительно обеспечивает возможность работы в двухчастотном режиме РЛС. м исключением магнетрона (ATSR-22 с жидкостным охлаждением, ATSR-44 с воздушным охлаждением) и выходного каскада модулятора на полупроводниковых приборах. Структурная схема РЛС приведена на рис. 3.3.
Антенна РЛС является антенной типа С-14 и состоит из отражателя двойной кривизны и двух рупорных облучателей, формирующих основной и дополнительный лучи ДН в вертикальной плоскости. В состав антенно-фидерного тракта входит опорно-поворотное устройство, вырабатывающее опорные сигналы для антенны ВРЛ, приемного устройства, и сигнал, содержащий коды секторов азимута. В волноводном устройстве входные сигналы на частотах f1 и f2 поступают на диплексер (разделитель) через устройство ввода шума, затем с помощью специальных ответвителей часть мощности подается на систему АПЧ комплектов А и В и устройства фазирования когерентных гетеродинов. Поскольку передающие устройства комплектов А и В запускаются со сдвигом t- 8 мкс, запирание приемных устройств производится управляющими сигналами от обоих комплектов,
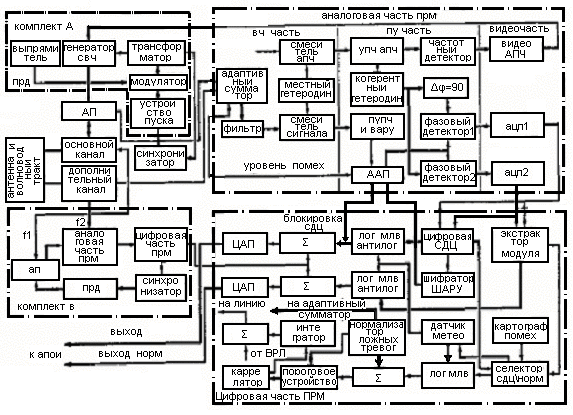
Рис.3.3. Структурная схема ATSR-44
поступающими через АП, выполненные на р-1-п диодах. Модульные транзисторные усилители обеспечивают коэффициент шума не более 2,5 дБ при коэффициенте усиления 25 дБ в полосе частот 100 МГц.
Ширина ДН по уровню 3 дБ составляет для основной и дополнительной ДН в горизонтальной плоскости: (1,2 ± 0,15)° и (1.2: ±0,2)°, а в вертикальной (4 + 0.8) и (5±0,6)° соответственно.
Передающие устройства РЛС ATSR 22/44 в качестве генератора СВЧ используют магнетрон с модуляторами, выполненными на линиях задержки, коммутирующим элементом которых является тиратрон. Для фиксирования момента формирования СВЧ импульса между модуляторами и магнетроном включается трансформатор тока, с вторичной обмотки которого снимается импульс, запускающий синхрогенератор. Коэффициент усиления ПУПЧ не менее 25 дБ при ширине полосы усилителя 12 ... 20 МГц.
Квадратурная система СДЦ, образованная благодаря использованию двух фазовых детекторов, позволяет устранить слепые фазы сигналов, возникающих за счет доплеровской модуляции амплитуды импульсов в пачке принимаемых эхо-сигналов. Блокировка устройства СДЦ осуществляется импульсами, сформированными в ААП по результатам анализа амплитуд входных сигналов и при последующем дискретном изменении коэффициента усиления приемника с шагом 10 дБ для сигналов, превышающих динамический диапазон в 40 дБ. При этом чтобы переключения СДЦ не происходили слишком часто (процесс уменьшения усиления может захватывать несколько периодов ввиду того, что амплитуда сигналов, отраженных от местных предметов, по сравнению с полезными значительно больше), в ААП предусмотрена возможность производить изменение коэффициента усиления не чаще, чем через 7-20 периодов повторения импульсов.
Устройство ШАРУ позволяет стабилизировать значение опорного коэффициента усиления, причем оценка последнего производится в цифровой части приемника путем подсчета количества шумовых выбросов, превосходящих заданный порог за время одного обзора.
Канал СДЦ включает в себя цифровую часть системы СДЦ, цифро-аналоговый преобразователь, цепи логарифмирования и антилогарифмирования сигналов и сумматор сигналов первого и второго комплектов. Динамический диапазон системы составляет 40 дБ.
Выходные сигналы цифровой части СДЦ, имеющей два канала - синусный и косинусный, подвергаются биномиальному взвешиванию в соответствии с весовой функцией, имеющей значения 1... 2,1 для каждых трех последовательных зондирований. Реализация данного алгоритма осуществляется путем двойного вычитания сигналов, содержащихся в трех смежных периодах повторения импульсов (А, В, С) в каждом из каналов. В устройстве двойного вычитания из сигналов первого периода Ua вычитаются сигналы второго периода Ub из сигналов третьего периода Uc снова вычитаются сигналы второго периода Ub и полученные разности суммируются. Таким образом, каждый из каналов схемы реализует операцию
U= (Ua-Ub)+(Uc- Ub).
Операция возможна при временном совпадении сигналов Ua, Ub, Uc. Последнее достигается задержкой сигналов Ua и Ub на два и один период следования импульсов соответственно, которая производится с помощью цифровых линий задержки, выполненных на регистрах сдвига.
С выхода второго вычитающего устройства сигналы поступают на экстрактор модуля. Экстракторы модуля восстанавливают амплитуды сигналов, очищенных от помех, вызываемых отражениями от местных предметов и сигналов с помехами. На выходе блока амплитуда
U = (U2sin + U2cos) ½.
Амплитуда полезных сигналов при двойном вычитании будет определяться амплитудно-скоростными характеристиками системы СДЦ, а уровень собственных шумов
U= (Uша+Uшв+Uшс)1/2.
В предположении, что уровень флуктуационных шумов в соседних периодах повторения зондирующих импульсов остается постоянным, получаем
Uш
=![]() Uша,
Uша,
т. е. двойное вычитание приводит к увеличению собственных шумов в примерно 2.4 раза.
Нормализатор шума, установленный в цифровой части СДЦ после экстрактора модуля, позволяет уменьшить коэффициент усиления в раз, чем снимается результат обработки неизменных флуктуационных шумов в предыдущих трактах.
Подавитель метеопомех построен по схеме «усилитель с логарифмической амплитудной характеристикой - цепь с малой постоянной времени - усилитель с антилогарифмической характеристикой». Сигналы, отраженные от метеообразований, сильно флуктуируют и поэтому плохо подавляются системой СДЦ. В усилителе с ВСХ эти сигналы приводятся к постоянному значению. Постоянная составляющая видеосигнала, обусловленная помехами, не пропускается цепью с малой постоянной времени. Поэтому в случае тождественности уровней собственных шумов приемника и помех обеспечивается постоянство ложных тревог РЛС. Усилитель с антилогарифмической АЧХ восстанавливает динамический диапазон сигнала. Команда на включение цепочек ЛОГ-МПВ-АНТИЛОГ поступает от датчика метео, принцип действия которого основан на анализе сигналов, свободных от помех. При отсутствии помех усилитель с ВСХ вносит потери 2 дБ.
Картограф помех осуществляет управление селектором, через который поступают сигналы каналов. Устройство запоминает пространственное положение участков с помеховыми сигналами и обеспечивает в зависимости от обстановки выдачу сигналов на селектор, после которого идут комбинированные сигналы. В состав картографа входят датчик помех и блок памяти с 2048 ячейками (64 азимутальных сектора и 32 сектора по дальности).
Анализируется 200 элементов разрешения в пределах каждой ячейки блока памяти и подаются на компаратор, куда заводится и пороговый сигнал. Если плотность помех, оцениваемая по числу выбросов, превосходит порог, через селектор поступает разрешающий сигнал с СДЦ.
Комбинированные сигналы в отличие от нормальных видеосигналов и сигналов СДЦ подаются на контрольные индикаторы или транслируются по широкополосным линиям связи, минуя АПОИ. Их обработка осуществляется интегратором, позволяющим бороться с несинхронными непреднамеренными помехами и уменьшающим уровень нескомпенсированных остатков помех от местных предметов и собственных шумов приемника, поддерживая их в пределах, обеспечивающих функционирование нормализатора ложных тревог. Интегратор реализует принцип движущегося окна, при котором суммируются сигналы каждого элемента дальности в нескольких смежных развертках, количество которых обычно усредняется по числу импульсов в пачке, а затем сопоставляются с пороговым значением, обеспечивающим максимальное отношение сигнал-помеха при заданной вероятности ложных тревог. Уровень порога определяется в соответствии с критерием Неймана-Пирсона.
В интеграторе движущегося окна используются два порога: переменный, который управляется нормализатором ложных тревог (НЛТ), и порог, определяемый возможностью приема только за счет верхнего луча ДН. Нормализатор ложных тревог интегрирует дважды сигналы поэлементно. Результат второго интегрирования подается на ААП, а также на схему оперативного изменения первого порога интегратора. Причем, если прием отраженных сигналов верхним лучом окажется недостаточным для подавления помех от «ангелов», окончательная нормализация в интеграторе будет достигнута за счет изменения первого порога.
Для подавления помех, вызванных отражениями от объектов, расстояния до которых D > сТп/2, где Тп - период повторения импульсов, используется видеокоррелятор. Количество анализируемых разверток выбирается равным числу вобуляции Тп (для ATSR – 22 - 6). Для уменьшения потерь видеокоррелятор включается лишь на тех азимутах, где наблюдаются отражения, вызванные сверхдальним приемом.
Радиолокационные станции ATSR-22 и ATSR-44 имеют аппаратуру встроенного контроля, предназначенную для постоянной проверки работоспособности РЛС и выдачи сигналов о неисправности или необходимости проведения локализуемых операций по обнаружению ненормального состояния оборудования. Достоверность контроля превышает 0,95. Контролю подвергаются все функциональные узлы РЛС, кроме антенны.