

22.. Оценка динамических погрешностей при использовании аналоговых средств измерения
Простейшая оценка динамических погрешностей при использовании аналоговых средств регистрации. Как видно из данных табл. 1-1, с применением ручной записи показаний, цифропе-чати или перфораторов могут быть зарегистрированы только очень медленные процессы с периодом 0,6 с — 2,2 мин (при ут «s яй 1%). Поэтому для регистрации процессов, протекающих с частотами от 1 Гц до 5—50 кГц, широко используются аналоговые средства регистрации: самопишущие приборы с чернильной за
СО, 1
° 4
f f f
тгр 'rp lo
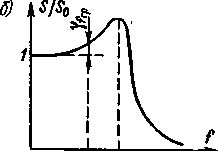
Рис. 1-8
писью, светолучевые и электронные осциллографы с фотопри- . ставками.
Динамические погрешности таких приборов, а также исполь-вуемых в комплекте с ними датчиков и усилителей принято нормировать указанием их амплитудно-частотной характеристики, представляющей собой график зависимости от частоты / отношения их чувствительности 5 при частоте / к чувствительности 5 при / = О (см. ГОСТ 8.256—77).
В большинстве случаев эти характеристики имеют вид кривых, показанных на рис. 1-8. При апериодической частотной характеристике (рис. 1-8, а) (показывающие приборы, усилители, датчики температуры и т. п.) чувствительность 5 прибора или датчика монотонно понижается с ростом частоты / воспринимаемого процесса. Частотная погрешность yf есть разность между ординатами частотной характеристики и постоянным уровнем S/S0 = s= 1, показанным на рис. 1-8, а штриховой прямой. Она всегда отрицательна и увеличивается с ростом частоты /. Ее численное значение может быть найдено из этого графика для любой частоты и использовано для оценки точности регистрации или введения поправки в результат измерения.
Частотная характеристика, изображенная на рис. 1-8, б, характерна для колебательных систем с малым успокоением (гальванометров, светолучевых осциллографов, датчиков манометров, акселерометров и т. д.). Она имеет резонансный пик вблизи собственной частоты /о колебательной системы иположитель-н у ю частотную погрешность yf.
Для приборов и датчиков с такими частотными характеристиками нормируется рабочий диапазон частот, простирающийся от / = 0 до такой частоты /гр, где yf достигает некоторого граничного значения ^/гр- Так как граничное значение частотной погрешности достигается только в конце рабочего диапазона частот, то внутри его частотные погрешности оказываются много меньше этого значения.
Располагая частотной характеристикой прибора или датчика, можно найти частотную погрешность для любого значения частоты регистрируемого процесса внутри рабочего диапазона частот. Так, например, при частотной характеристике, приведенной
на рис. 1-8, б, частотная погрешность может быть рассчитана по
формуле
?, » (1 - 2ра) (Ша, (1-Ю)
где р ■— степень успокоения колебательной системы; fa — ее собственная частота.
При отсутствии успокоения ф ж 0), что характерно для датчиков, не имеющих специальных средств успокоения, частотная погрешность
?/«(Ша. 0-И)
Так же легко может быть вычислена частотная погрешность и для апериодических (неколебательных) преобразователей невысоких порядков. Так, например, термопара или термометр сопротивления могут быть представлены апериодическим звеном первого порядка (с одной постоянной времени). Для них частотная погрешность может быть приближенно выражена как
?**-4-<ш\ (М2)
где fc ■== (2ПТ)"1 — так называемая частота среза частотной характеристики, а т — постоянная времени.
Практическое использование формул (1-11) и (1-12) рассмотрим на двух конкретных примерах.
Пусть для регистрации пульсирующего давления исполь-вуется мембранный датчик (тензометрический, пьезоэлектрический, емкостный или индуктивный) с собственной частотой /0 =а t= 5 кГц. Какие процессы и с какой погрешностью могут быть им измерены? Полагая, что степень успокоения датчика |3 ?» 0, и используя соотношение (1-11), получаем, что при частоте измеряемого процесса / = 50 Гц его частотная погрешность yf = 0,01 %, но при / в= 100 Гц уже «р/ = 0,04%, при / = 500 Гц -р/ =1%, а при / = 1000 Гц 7/ =4%, т. е. рабочий диапазон частот датчика оказывается уже исчерпанным.
Пусть периодические колебания температуры измеряются с помощью термопары или термометра сопротивления средней инерционности с постоянной времени чг == 1 мин = 60 с. Спрашивается, каков рабочий диапазон частот такого датчика? Для этого преобразуем формулу (1-12), заменив / на 1/Т, где Т — период измеряемого процесса; тогда получим
„ 1 f* __ 1 (2ят)а 2яата
Т/ ^ 2 /2 2 Т% Т%
Подставляя в это выражение разные вначения периода Т измеряемых колебаний, получим частотную погрешность <ру = = 0,14% при периоде колебаний Г =2 ч, ^/ =0,5% —при Т = 60 мин, ^ в 2% — при Т s= 30 мин, ^ = 5% —- при Т =
г— 20 мин, т. е. рабочий диапазон частот можно считать исчерпанным.
Соотношения (1-11) и (1-12) показывают, что частотная погрешность возрастает пропорционально квадрату частоты, что, как и при дискретных отсчетах 1см. формулу (1-9)], приводит к очень неблагоприятным соотношениям при регистрации несинусоидальных процессов. Поэтому изложенные выше предостережения остаются актуальными и в этом случае.