

Исследование электронного регулятора ру4-16а
Цель работы, является ознакомление с устройством унифицированного регулятора РУ4-16А, методами его настройки и влиянием параметров настройки на характер выходного сигнала регулятора.
Электронный регулятор был разработан Киевским заводом “Электроприбор”.
Регулятор является регулятором приборной системы, предназначенный для регулирований различных технологических параметров, работает в комплекте с вторичными измерительными приборами, имеющими встроенный реостатный датчик, и с исполнительными электрическими механизмами, имеющими реостат обратной связи.
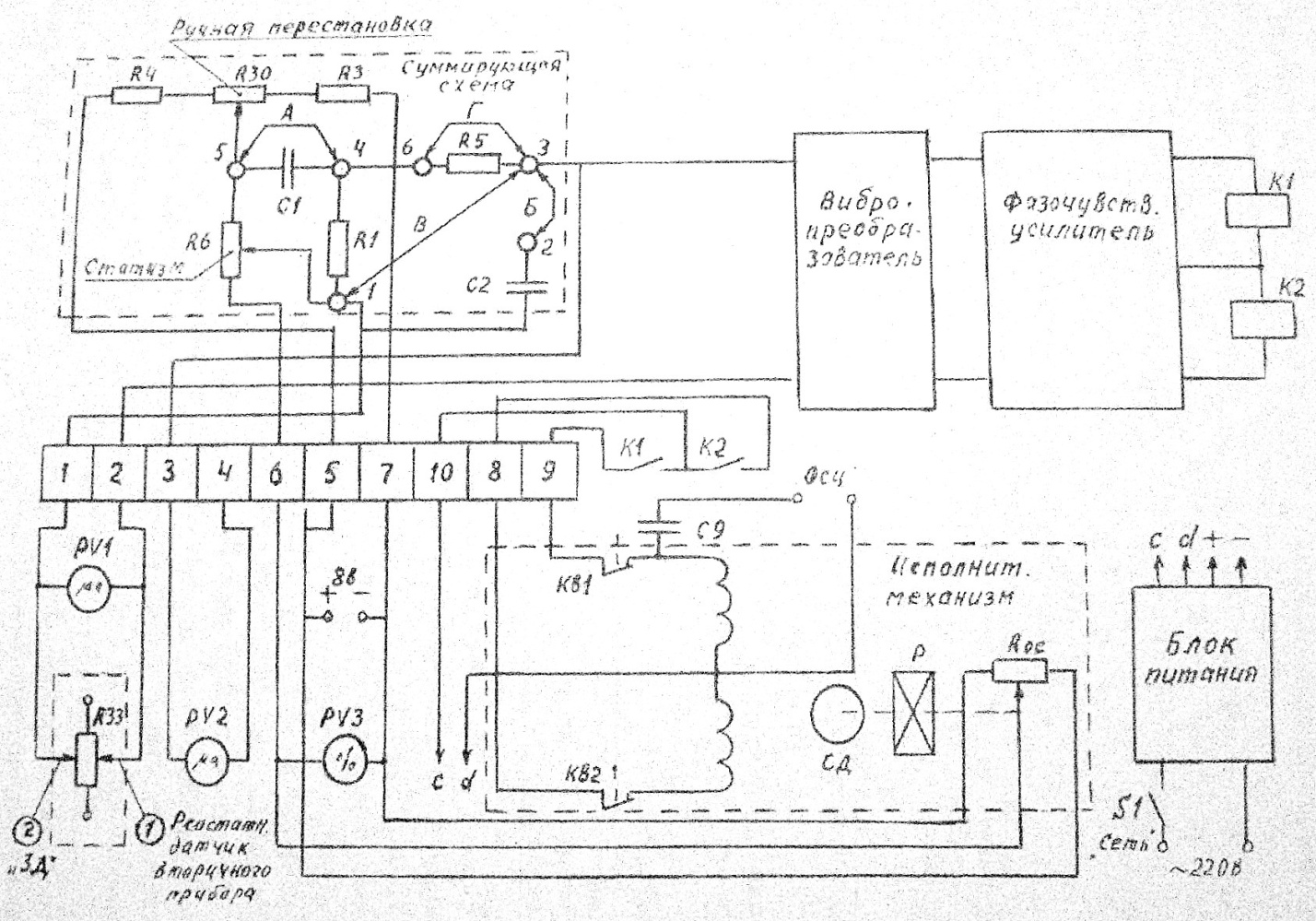
Рисунок 1 – Принципиальная схема регулятора РУ4-16А
Регулятор состоит из суммирующей схемы, вибропреобразователя и фазочувствительного электронного усилителя с выходными реле К1 и К2. При отклонении регулируемого параметра от заданного значения перемещается ползунок 1 реостного датчика R33 вторичного измерительного прибора, создавая вместе с ползунком задатчика 2 напряжение разбаланса. Сигнал разбаланса поступает в суммирующую схему, где он сравнивается с сигналом реостата обратной связи Rос исполнительного механизнизма и преобразуется в соответствии с выбранным законом регулирования, затем он усиливается трехкаскадным электронным фазочувствительным усилителем и через одно из выходных реле приводит в действие исполнительный механизм. Суммирующая схема состоит из реостатного датчика R33, моста обратной связи R3, R4, R30, Rос и интегродифференцирующей цепочки R1, C1, R5, C2, позволяющей сформировать тот или иной закон регулирования. Сигнал на интегродифференцирующую цепочку подается с резистора R6, включенного в диагональ моста обратной связи.
На пульте переключение законов расположены переключатели режимов:
- “Ручная перестановка” (потенциометр R30) – изменение ручным способом положения исполнительного механизма при фиксированном положении движков 1 и 2 потенциометра R33, соответствующем x = 0 (сигнал рассогласования фактического и заданного значений регулируемой величины – напряжения разбаланса).
- “Статизм” (потенциометр R6) – изменение коэффициента обратной связи, а значит, и общего коэффициента усиления регулятора Kp.
- “Стабил. связь” – инерционная связь, охватывающая выходной каскад усилителя вместе с реле К1 и К2. Она выводит регулятор в скользящий режим работы и одновременно позволяет избавится от перекомпенсации сигналом обратной связи входного сигнала разбаланса, возникающей из-за инерции усилителя и исполнительного механизма, а значит, и от автоколебаний в регуляторе.
- “Установка нуля” – балансировка выходного сигнала усилителя.
- “Чувствительность” – регулировка чувствительности усилителя, а значит и регулятора в целом.
Выполнение работы:
Для П - закона
При повороте рукоятки “ЗД” зона нечувствительности регулятора (Хн):
1. Чувствительность на 5:
- по часовой стрелки
|
- против часовой стрелки
|
Нечувствительность экспериментально не улавливается.
1. Чувствительность на 0:
- по часовой стрелки
|
- против часовой стрелки
|
Нечувствительность экспериментально не улавливается.
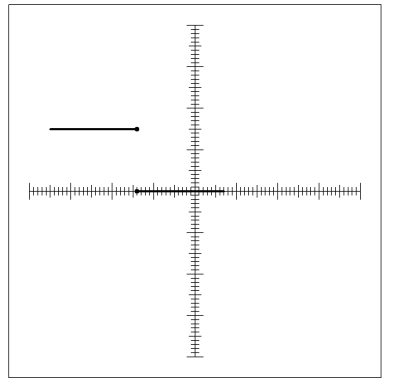
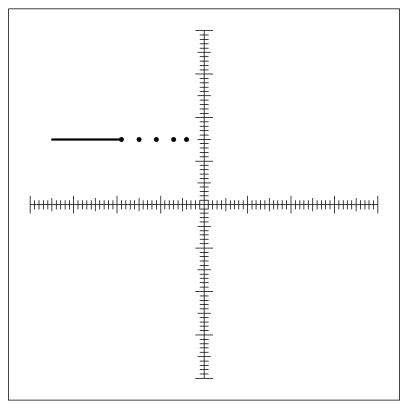
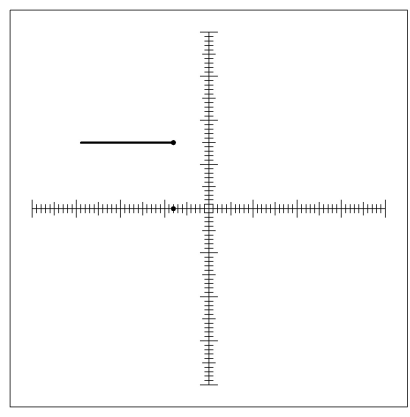
Время пробега луча осциллографа приблизительно 10 секунд, при сетки в 80 мм, скорость составляет 8 мм/с . При непрерывной работе.
Для П- закона
Статизм 4 |
Статизм 6 |
||
|
“ЗД” 6 |
|
|
PV1 = 15 мА |
|
||
PV3 = 75 % |
PV3 = 60 % |
||
t = 4,26 с |
t = 4,88 с
|
||
Статизм 7 |
Статизм 3
|
||
|
|
|
Быстрее чем статизм 4 |
|
|
||
PV3 = 90 %
|
|
||
t = 12,56 с
|
|
||
Для ПИ- закона
Статизм 6 |
|
|||
|
|
|
|
|
|
|
|||
|
|
|||
t = 22,30 с
|
|
|||
R1 = 75 |
||||
|
PV1 = 20
|
|
PV1 = -10
|
|
PV3 = 90 % |
PV3 = 0 |
|||
t = 20 с |
t = 30 с |
|||
Ручка 6 |
Ручка 4 |
|||
R1 = 50 |
||||
|
PV1 = 20 |
|
PV1 = -10 |
|
PV3 = 90 % |
PV3 = 0 |
|||
t = 20 с |
t = 12 с |
|||
Ручка 6 |
Ручка 4 |
|||
п. 20
Ручка 6 PV1 = 15, PV2 = 0, PV3 = 65
Ручка 7 PV1 = 30, PV2 = 0, PV3 = 80
Ручка 4 PV1 = -15, PV2 = 0, PV3 = 35
Ручка 3 PV1 = -30, PV2 = 0, PV3 = 80
ПИД – закон ведет себя так же как и ПИ - закон