

Тема 5. Об’ємні гідроприводи
Загальні відомості
Приводом називають сукупність пристроїв , призначених для приводу в рух механізмів і машин. Розрізнюють електричний, механічний, пневматичний, гідравлічний та інші приводи. В електричному приводі рух передається і перетворюється за рахунок електричного струму; в механічному – за рахунок твердих тіл; в пневматичному - стиснутим повітрям, а в гідравлічному - рідиною під тиском.
Гідравлічні приводи, які використовуються в транспортних і дорожніх машинах, підрозділяються на об’ємні і гідродинамічні.
Об’ємний гідропривод в більшості випадків повністю замінює механічну трансмісію. В ньому використовують об’ємні гідромашини.
Гідродинамічний привод не виключає механічну трансмісію, а лише замінює муфту щеплення. В гідродинамічному приводі використовуються динамічні насоси (ведуча ланка) і доцентрові турбіни (ведена ланка). Ведуча і ведена ланки гідродинамічної передачі розміщуються в загальному герметичному корпусі.
Визначення і склад об’ємних гідроприводів
Об’ємним гідроприводом називається сукупність пристроїв, об’ємних гідромашин і гідроапаратів, призначених для передачі механічної енергії на відстань і перетворення руху за допомогою рідини під тиском. Гідростатичний тиск є основою об’ємного гідропривода, а рух вихідних ланок гідродвигунів – наслідком переміщення об’ємів рідини під тиском в замкнутому просторі.
Об’ємний гідропривод складається з основного і допоміжного гідравлічного обладнання.
До основного гідравлічного обладнання відносяться:
насоси, гідродвигуни, гідроапарати, гідролінії, кондиціонери робочої рідини.
Допоміжне обладнання об’ємного гідропривода включає: прилади для вимірювання витрати, тиску, температури і рівня робочої рідини, частоти обертання вала і величини крутного моменту; пристрої для підживлення системи маслом (ежектори), випуску повітря із системи, або сполучення її з атмосферою (крани, фільтри-сапуни), тощо.
Переваги і недоліки об’ємних гідроприводів
Переваги об’ємних гідроприводів - компактність, невеликі маса та габарити (в них майже немає таких елементів, як вали, редуктори, муфти, гальма, канати тощо);
- мала інерційність, що дає змогу зменшити тривалість робочого циклу і збільшити продуктивність машин;
- безступінчасте регулювання швидкості руху вихідної ланки, завдяки якому підвищується коефіціент використання приводного двигуна;
- зручність і простота керування;
- незалежне розташування насосів і гідродвигунів, що дає можливість раціонально розмістити їх у машині;
- запобігання від перевантаження;
- просте перетворення обертального руху в поступальний;
- застосування уніфікованих елементів (насосів, гідромоторів, гідроциліндрів, гідроапаратів), що зменшує собівартість приводу і полегшує його експлуатацію.
Недоліки об’ємних гідроприводів: порівняно невисокий ККД (0,6...0,8); чутливість до забруднення робочої рідини, а також до зміни її в’язкості при підвищенні температури; високі вимоги до виготовлення елементів гідропривода, до культури його обслуговування; здатність забруднювати оточуюче середовище.
Класифікація об’ємних гідроприводів
Об’ємні гідроприводи класифікуються по джерелу подачі робочої рідини, по характеру руху вихідної ланки, по можливості регулювання вхідної або вихідної ланок і по циркуляції робочої рідини.
По джерелу подачі робочої рідини об’ємні гідроприводи поділяються на насосні, безнасосні, акумуляторні і магістральні.
Насосний гідропривод – той, в якому робоча рідина подається в гідродвигун насосом, який в свою чергу входить в склад цього привода.
В транспортних і дорожніх машинах акумуляторний і магістральний гідроприводи не використовуються. Приміняються лише об’ємні гідроприводи, в склад яких входять гідро-акумулятори.
Безнасосний гідропривод – той, який працює по принципу сполучених сосудів і приводиться в дію механічним способом.
За характером руху вихідної ланки об’ємні гідроприводи поділяють на гідроприводи поступального, обертового і поворотного руху.
В гідроприводах поступального руху в якості гідродвигуна використовуються гідроциліндри, штоки яких здійснюють зворотно- поступальний рух (рис. 1.36, а ); обертового руху – гідромотори (рис. 1.36, б ); поворотного – моментні гідроциліндри, вали яких здійснюють поворотний рух.
По можливості регулювання вхідної або вихідної ланок об’ємні гідроприводи поділяють на нерегульовані і регульовані.
В нерегульованих гідроприводах швидкість вихідних ланок не регулюється.
Регульвані об’ємні гідроприводи – це такі, в яких швидкість вихідних ланок може регулюватись по потрібному закону або по бажанню оператора.
Регулювання швидкості переміщення вихідних ланок об’ємних гідроприводів може бути ступеневим і безступеневим.
Ступеневе регулювання здійснюється за рахунок ступеневої зміни подачі насосів або витрати гідродвигунів. Змінюючи кількість підключених насосів з однаковими або різними подачами, а також включаючі або виключаючі різну кількість гідродвигунів, можна досить плавно переходити від однієї швидкості вихідних ланок до іншої.
Безступеневе регулювання швидкості руху вихідних ланок здійснюється за рахунок використання регульованих насосів або гідромоторів, а також за рахунок дросельного регулювання.
По циркуляції робочої рідини об’ємні гідроприводи поділяються на гідроприводи з замкненим і незамкненим контурами циркуляції робочої рідини. В першому випадку гідробака немає - робоча рідина від насоса надходить у гідродвигун, а звідти повертається у всмоктувальний трубопровід насоса (рис. 1.36, б). В другому – гідробак є (рис.1.36, а). При цьому насос всмоктує рідину з відкритого баку і нагнітає її в гідравлічний двигун, звідти вона повертається в той самий бак.
Умовні позначення елементів об’ємних гідроприводів
Н асос
нерегульований (буквенне позначення
Н)
асос
нерегульований (буквенне позначення
Н)
а) з постійним напрямком потоку;
б) реверсивним.
Н
 асос
регульований: (Н)
асос
регульований: (Н)
а) з постійним напрямком потоку;
б) реверсивним.
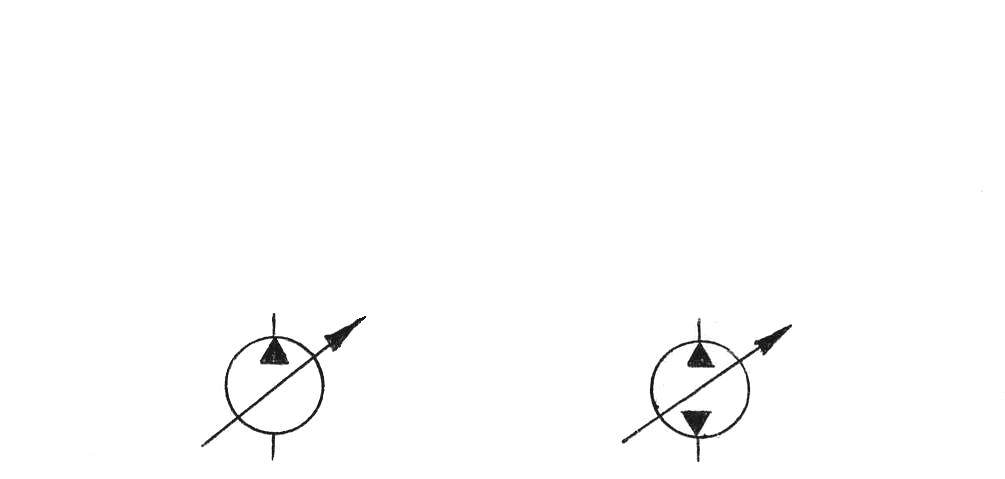
Г![]() ідромотор
регульований: (М)
ідромотор
регульований: (М)
а) з постійним напрямком потоку;
б) реверсивним.
Гідромотор нерегульований: (М)
а![]() )
з постійним напрямком потоку;
)
з постійним напрямком потоку;
б) реверсивним.
Г![]() ідроциліндр:
(Ц)
ідроциліндр:
(Ц)
а) односторонньої дії;
б) двосторонньої дії.
Г ідроциліндр:
(Ц)
ідроциліндр:
(Ц)
а) плунжерний;
б) телескопічний.
Г ідроакумулятор
:(АК)
ідроакумулятор
:(АК)
а) пневмогідравлічний;
б) пружинний.
Г ідророзподільник:
(Р)
ідророзподільник:
(Р)
а) двопозиційний;
б) трипозиційний.
Г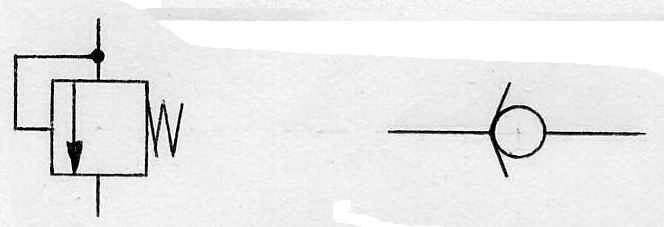 ідроклапан:
ідроклапан:
а) запобіжний (КП);
б
а )
дросель нерегульований;
)
дросель нерегульований;
б )
подільник потоку
(ДП);
)
подільник потоку
(ДП);
а) фільтр (Ф );
б) теплообмінник ( ТА);
Г![]() ідробак
(Б).
ідробак
(Б).
Принцип дії об’ємного гідравлічного привода. Статика силового циліндра
Структурна схема об’ємного привода представлена на (рис.1.30).
Г ідравлічні
приводи широко використовують для
здійснення зворотно-поступального
переміщення, обертання або повороту
робочих органів різноманітних транспортних
та інших технологічних машин, особливо
у тих випадках, коли необхідно одержати
значні зусилля (моменти) на робочих
органах машин при малих габаритних
розмірах привода, а також забезпечити
високу плавність руху та експлутаційну
надійність.
ідравлічні
приводи широко використовують для
здійснення зворотно-поступального
переміщення, обертання або повороту
робочих органів різноманітних транспортних
та інших технологічних машин, особливо
у тих випадках, коли необхідно одержати
значні зусилля (моменти) на робочих
органах машин при малих габаритних
розмірах привода, а також забезпечити
високу плавність руху та експлутаційну
надійність.
Застосування гідравлічних приводів є доцільним і тоді, коли необхідно забезпечити безступінчасте регулювання швидкості їх руху, високу частоту реверсування і автоматичне керування.
Привод (рис.1.31) складається з гідронасоса 1, що забезпечує безперервну подачу робочої рідини в систему, напірного (запобіжного) гідроклапана 2, що забезпечує необхідний робочий тиск у системі і запобігає її перевантаженню, регулятора швидкості робочого органу – дроселя 3, гідророзподільника 4, гідроциліндра 5, поршня 6 і штока, з’єдниних з робочим органом 7, а також гідроклапана 8, що створює певний тиск на лінії зливу і забезпечує плавність переміщення робочого органу.
П ривод
працює слідуючим чином. Робоча рідина
від насоса 1,
приведеного в рух двигуном (на схемі не
зображено), під тиском, створюваним
напірним гідроклапаном 2,
через дросель 3
і гідророзподільник 4
потрапляє до лівої (поршневої) порожнини
гідроциліндра. Під дією тиску масла в
цій порожнині поршень 6
і пов’язаний з ним за допомогою штока
робочий орган 7
переміщується праворуч зі швидкістю
υп1.
При
цьому робоча рідина з правої (штокової)
порожнини гідроциліндра через
гідророзподільник 4
і гідроклапан 8
витискується у бак. У кінці ходу робочого
органу подається керуючий сигнал
ривод
працює слідуючим чином. Робоча рідина
від насоса 1,
приведеного в рух двигуном (на схемі не
зображено), під тиском, створюваним
напірним гідроклапаном 2,
через дросель 3
і гідророзподільник 4
потрапляє до лівої (поршневої) порожнини
гідроциліндра. Під дією тиску масла в
цій порожнині поршень 6
і пов’язаний з ним за допомогою штока
робочий орган 7
переміщується праворуч зі швидкістю
υп1.
При
цьому робоча рідина з правої (штокової)
порожнини гідроциліндра через
гідророзподільник 4
і гідроклапан 8
витискується у бак. У кінці ходу робочого
органу подається керуючий сигнал
![]() на гідророзподільник 4,
який спричиняє переключення золотника
гідророзподільника. При цьому робоча
рідина потрапляє під тиском від насоса
1
через дросель 3
і гідророзподільник 4
до правої (штокової) порожнини
гідроциліндра, а ліва (поршнева) порожнина
через гідророзподільник 4
і гідроклапан 8
з’єднується з баком. Відбувається
реверс робочого органу. Поршень із
штоком і робочим органом переміщується
ліворуч зі швидкістю υп2.
У кінці ходу робочого органу ліворуч
керуючий сигнал
на гідророзподільник 4,
який спричиняє переключення золотника
гідророзподільника. При цьому робоча
рідина потрапляє під тиском від насоса
1
через дросель 3
і гідророзподільник 4
до правої (штокової) порожнини
гідроциліндра, а ліва (поршнева) порожнина
через гідророзподільник 4
і гідроклапан 8
з’єднується з баком. Відбувається
реверс робочого органу. Поршень із
штоком і робочим органом переміщується
ліворуч зі швидкістю υп2.
У кінці ходу робочого органу ліворуч
керуючий сигнал
![]() подається на гідророзподільник 4.
При цьому знову з’єднується поршнева
порожнина гідроциліндра з нагнітальною,
а штокова – із зливною гідролініями
системи, і робочий орган одержує
переміщення праворуч із швидкістю υп1.
подається на гідророзподільник 4.
При цьому знову з’єднується поршнева
порожнина гідроциліндра з нагнітальною,
а штокова – із зливною гідролініями
системи, і робочий орган одержує
переміщення праворуч із швидкістю υп1.
Таким чином, під дією тиску робочої рідини, що подається насосом в одну із порожнин гідроциліндра, його поршень, шток і зв’язаний з ними робочий орган рухаються в той чи інший бік з відповідною швидкістю. Від подачі робочої рідини насосом в порожнини гідроциліндра буде залежити швидкість руху поршня і робочого органу. Залежності, що зв’язують швидкість руху поршня, його ефективну площу та подачу робочої рідини насосом в ліву (поршневу) та праву (штокову) порожнини циліндра будуть відповідно
![]() та
та
![]() ,
(1.90)
,
(1.90)
де
υп1
та
υп2-
швидкості руху поршня відповідно ліворуч
і праворуч;
![]() та
та![]() - ефективні площі циліндра;
- ефективні площі циліндра;
![]() -
подача робочої рідини насосом в порожнини
гідроциліндра.
-
подача робочої рідини насосом в порожнини
гідроциліндра.
Звідси швидкості руху поршня будуть:
![]() ;
;
![]() . (1.91)
. (1.91)
Співвідношення
між цими швидкостями
![]() ,
тобто швидкості руху поршня
обернено-пропорційні його ефективним
площам. Якщо
,
тобто швидкості руху поршня
обернено-пропорційні його ефективним
площам. Якщо
![]() (циліндр
з двостороннім штоком), то і швидкості
руху
(циліндр
з двостороннім штоком), то і швидкості
руху
![]() .
При подачі робочої рідини під тиском
.
При подачі робочої рідини під тиском
![]() в
ліву порожнину циліндра сила, що діє на
поршень, буде дорівнювати:
в
ліву порожнину циліндра сила, що діє на
поршень, буде дорівнювати:
![]() .
(1.92)
.
(1.92)
Цій
силі протидіють сила тертя
![]() та сила корисного навантаження
та сила корисного навантаження
![]() ,
а також сила протитиску в штоковій
порожнині циліндра
,
а також сила протитиску в штоковій
порожнині циліндра
![]() ,
що виникає внаслідок гідравлічного
опору зливної гідролінії. Тоді рівновага
сил, що діють на поршень (баланс сил),
визначається залежністю:
,
що виникає внаслідок гідравлічного
опору зливної гідролінії. Тоді рівновага
сил, що діють на поршень (баланс сил),
визначається залежністю:
![]() (1.93)
(1.93)
Тут
-
тиск в робочій порожнині цилінда;
![]() - протитиск в неробочій порожнині;
- протитиск в неробочій порожнині;
![]() - відповідно ефективні площі поршня з
боку поршневої та штокової порожнин
циліндра.
- відповідно ефективні площі поршня з
боку поршневої та штокової порожнин
циліндра.
Ця залежність є рівнянням статики силового циліндра. Воно дійсне для усталеного режиму руху і не враховує інерційних сил.
Із (1.93) можна знайти величину тиску в робочій порожнині гідроциліндра, потрібного для переміщення робочого органу
![]() .
(1.94)
.
(1.94)
Т обто
для визначення величини необхідного
тиску в робочій порожнині циліндра
потрібно попередньо визначити величину
корисного навантаження
обто
для визначення величини необхідного
тиску в робочій порожнині циліндра
потрібно попередньо визначити величину
корисного навантаження
![]() ,
сил тертя
,
сил тертя
![]() та величину протитиску в неробочій
порожнині циліндра, яка залежить від
гідравлічного опору зливної гідролінії.
та величину протитиску в неробочій
порожнині циліндра, яка залежить від
гідравлічного опору зливної гідролінії.
Такий розрахунок необхідний для визначення характеристик гідроапаратури та гідронасоса при проектуванні гідравлічних приводів.