2.1 Особенности скалярного управления
Управление называют скалярным (т.е. численным, не векторным) тогда, когда для определения значения напряжения при задаваемой частоте используется функциональная зависимость между напряжением и требуемой частотой.
При изменении частоты питания f1 можно изменить скорость двигателя, однако следует учитывать, что ток намагничивания fp также зависит от частоты питания из-за индуктивного характера сопротивления обмоток двигателя. Если рассмотреть упрощенную эквивалентную схему обмотки двигателя (Рисунок 5) можно записать:

Учитывая, что в штатном режиме Xh>>R1 можно пренебречь значением R1 и записать данное выражение в виде:

Задача при применении частотного регулирования состоит в том, чтобы, удержать ток намагничивания 1Ц постоянным и равным номинальной величине 1Ц n, чтобы асинхронный двигатель всегда работал при номинальном потоке Фп, что позволит получить номинальный момент двигателя во всем диапазоне скоростей.
Чтобы сохранить ток намагничивания постоянным, напряжение U1 должно изменяться обратно пропорционально частоте (согласно формуле). Если это не выполняется, то ток намагничивания становится либо меньше (ослабленное поле), либо больше (перенасыщение).
Рисунок
6 - U/f
характеристики инвертора

Рисунок
7 - Эквивалентная схема обмотки
нагруженного двигателя, Rl-активное
сопротивление обмотки,
Xh
- реактивное сопротивление обмотки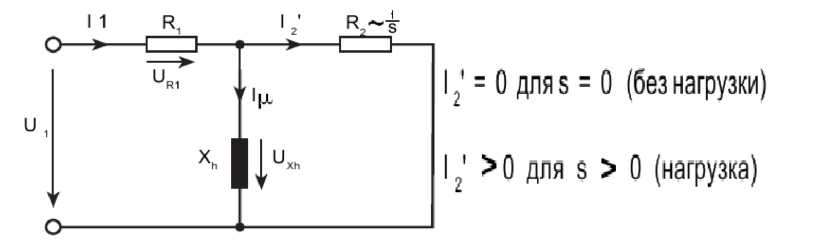
а)
б)
Рисунок
8 - Влияние величины буста на механическую
характеристику двигателя
а-буст
слишком мал, б-буст слишком большой

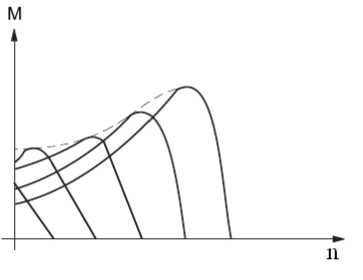

Когда установка буста некорректна, может наблюдаться следующее:
буст слишком мал (Рисунок 8,а). Максимальный момент уменьшается при низких частотах Наклон характеристик в рабочем диапазоне становится положе т.к. больше скольжение
буст слишком большой (Рисунок 8,б) В некоторых случаях максимальный момент увеличивается при низких частотах. Наклон характеристик становится круче ==> меньше скольжение Машина становится перенасыщеной, т.е. ток намагничивания значительно возрастает и следовательно наступает перегрев.
Асинхронный электропривод со скалярным управлением является на сегодняшний день наиболее распространенным. Он применяется в составе приводов насосов, вентиляторов, компрессоров и других механизмов, для которых важно поддерживать либо скорость вращения вала двигателя (при этом используется датчик скорости), либо технологический параметр (например, давление в трубопроводе, при этом используется соответствующий датчик).
Метод скалярного управления относительно прост в реализации, но обладает двумя существенными недостатками. Во-первых, при отсутствии датчика скорости на валу двигателя невозможно регулировать скорость вращения вала, так как она зависит от нагрузки. Наличие датчика скорости решает эту проблему, однако остается второй существенный недостаток — нельзя регулировать момент на валу двигателя. С одной стороны, и эту проблему можно решить установкой датчика момента, однако такие датчики имеют очень высокую стоимость, зачастую превышающую стоимость всего электропривода. Но даже при наличии датчика управление моментом получается очень инерционным. Более того, при скалярном управлении нельзя регулировать одновременно и момент и скорость, поэтому приходится выбирать ту величину, которая является наиболее важной для данного технологического процесса.
Для устранения недостатков, присущих скалярному управлению, фирмой SIEMENS еще в 1971 году был предложен метод векторного управления. Первые варианты электроприводов с векторным управлением требовали использования двигателей со встроенными датчиками потока. Это существенно ограничивало применение таких приводов.
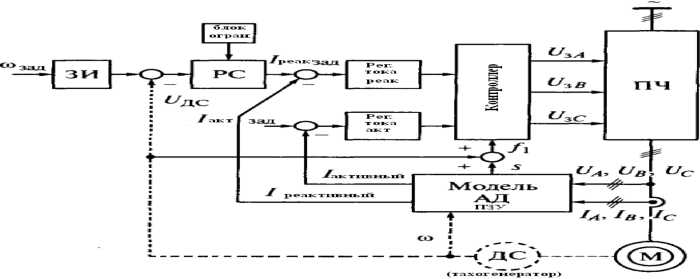
Рисунок
9 - Структурная схема векторного
управления