

2.2. Руководство по схемам и системам
2.2.1. Системная карта
Системная карта – это по существу моментальный фотоснимок. Она показывает компоненты системы и ее окружение в определенный момент времени. За исключением тех случаев, когда некоторые компоненты, сгруппированные в подсистемы, в некоторой степени перекрывают друг друга, системная карта содержит не больше информации, чем список компонентов. Однако, системная карта более наглядна и удобна для восприятия.
Основное назначение системных карт – помочь решить, как структурировать систему и как передать другим информацию о той системе, которую выбрали для исследования. В частности, системные карты используются для того, чтобы:
Внести ясность в мысли на раннем этапе анализа.
Выбрать структурные элементы для более подробной схемы.
Провести опробование предварительно обозначенных границ.
Определить уровень системы, представляющей интерес.
Передать информацию о базовой структуре описываемой системы.
По существу системная карта выражает морфологию (состав) систем, устанавливая принадлежность компонентов к подсистеме.

Рис2. Системная карта процесса автоматизации процесса переработки молока в сырных ваннах.
2.2.2. Схема влияния
Схема влияния показывает основные характеристики системы автоматизации и значимые отношения, существующие между ними. Такая схема дает обобщенное представление о системе автоматизации или о существующих в системе организационных и других важнейших отношениях между ними. Схема влияния используется для изучения этих отношений, в результате чего проводится перегруппировка компонентов и система и ее компоненты определяются заново.
Рис3. Схема влияния внешних факторов на регулируемые параметры
2.2.3. Схема технологического процесса
Назначением схемы технологического процесса являются:
Анализ или показ стадий процесса или технологии;
Показ отношений входа-выхода в связанных между собой организациях или частях организаций.
Рис4. Схема технологического процесса переработки молока в сырных ваннах.
2.2.4. Схема параметрической модели объекта автоматизации
Назначением схемы параметрической модели объекта автоматизации являются:
Определить, какие результаты требуются на выходе данного процесса;
Определить процесс, необходимый для получения этих результатов;
Определить, что должно быть на входе для того, чтобы в результате процесса было получено то, что требуется на выходе.
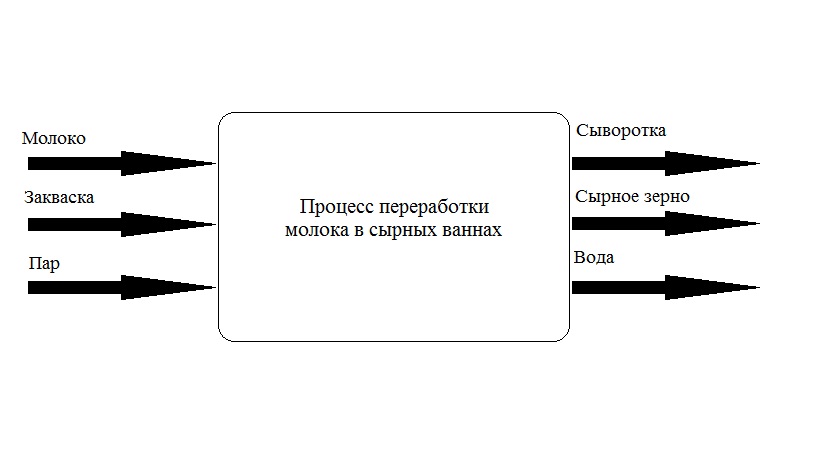
Рис5. Схема параметрической модели объекта автоматизации.
2.2.5. Схема поля сил
Назначением схемы поля сил являются:
Определить движущие и сдерживающие силы при осуществлении изменений в данной ситуации;
Дать возможность выразить величины этих сил.
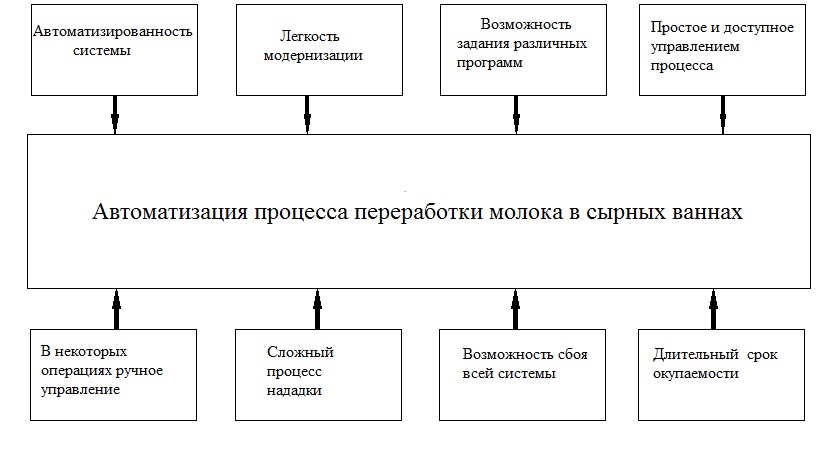
Рис6. Схема поля сил.
Глава3. Идентификация математической модели сыродельной ванны как объекта регулирования температуры
Идентификация структуры и параметров математической модели (ММ) объекта управления (ОУ) системы автоматического регулирования температуры (САРТ) в сыродельной ванне осуществляется на основе полученной экспериментально переходной функции (кривой разгона) hэ(t), представленной в табл.2 и на рис.7.
Текущее значение температуры является выходным сигналом. Входные сигналы: задающее воздействие - заданное значение температуры, возмущение - появление в резервуаре продукта с отличной от заданной температурой, управляющее воздействие - угол открытия крана подачи горячего пара.
Таблица 2
№ точки |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
Время, с |
0 |
5 |
10 |
20 |
40 |
60 |
80 |
100 |
120 |
140 |
160 |
180 |
220 |
500 |
hэ(t), град.С° |
0,000 |
0,028 |
0,095 |
0,263 |
0,560 |
0,748 |
0,857 |
0,919 |
0,954 |
0,974 |
0,985 |
0,991 |
0,997 |
1,000 |
hM(t), град.С0 |
0,000 |
0,027 |
0,093 |
0,262 |
0,559 |
0,747 |
0,857 |
0,918 |
0,953 |
0,973 |
0,984 |
0,991 |
0,997 |
1,000 |
Рис .7. Графики переходных функций ОУ
Параметры ММ определяем следующим образом:
По виду переходной функции на рис. 1, полагаем, что структура ММ ОУ имеет вид:
2) Коэффициент усиления определяем из графика переходной функции hэ(t) и известного условия:
k=h(∞)=1,0
3) Остальные параметры: постоянные времени Т1, Т2 определяем с использованием метода интегральных оценок (ИО), ЭВМ и системы СИАМ (системы автоматизированного моделирования).
Схема идентификации модели резервуара в СИАМ с использованием прямых методов оптимизации представлена на рис.8.
Для решения задачи выполняем следующие действия:
В СИАМ набираем схему идентификации модели резервуара с использованием прямых методов оптимизации (рис. 8).
В окне моделирования выбираем метод Кутта-Мерсона и время конца интегрирования tK — 495. Выбранные параметры интегрирования используются в задаче идентификации.
3) Идентифицируем параметры блоков №7:Т1 и №8: Т2. Для этого в окне оптимизации выбираем метод покоординатного спуска и определяем интервал неопределенности параметров 0.00001,назначаем целевую функцию (ИО) в блоке №5, выбираем блоки, в которых определяются параметры: выбираем звено №7 и задаем минимальное (1.0) и максимальное (100) значения параметра Т1, далее выбираем блок №8 и задаем минимальное(1.0) и максимальное (100) значение параметра Т2.
В результате идентификации в блоках № 7 и №8 запоминаются искомые значения Т1 = 16,7, Т2 = 19,1 с. В дальнейшем значения найденных параметров не изменяем.

4) Далее в окне моделирования рассчитываем переходные функции в системе с найденными параметрами. По таблице выходе блока №4 оцениваем максимальную абсолютную ошибку оценки экспериментальной переходной функции.
Численные значения переходной функции hM(t) с выхода блока №8 записываем в таблицу 2. и строим график этой функции на рис.7. Как видно, графики переходных функций практически совпадают.
Таким образом, на основании экспериментально полученной кривой разгона системы регулирования температуры в сырной ванне определены структура ММ в виде апериодического звена второго порядка и ее параметры:
к = 1, Т1 =16,7 с, Т2= 19,1 с
Максимальная абсолютная ошибка оценки экспериментальной переходной функции:
Δhmax =0,0056
что свидетельствует о высоком качестве идентификации.