

5.2 Описание звена в уравнениях состояния
Описать данное звено можно в дискретных уравнениях состояния вида
![]()
Для заполнения матриц и векторов данной системы за основу необходимо снова взять за основу передаточную функцию (3.2).

Таким образом,
![]()
5.3 Построение частотных характеристик звена
Построим АЧХ звена, для чего в (3.2) сделаем подстановку
![]()
На рисунке 5.1 показана АЧХ звена

Рисунок 5.1 АЧХ ДКУ
Наконец, построим асимптотические ПЧЛАХ и ПЧЛФХ, для этого (3.4) перепишем так

![]()
Расчетное выражение для ПЧЛФХ будет следующим
![]()
На рисунке 5.2 изображены ЛПЧХ ДКУ.
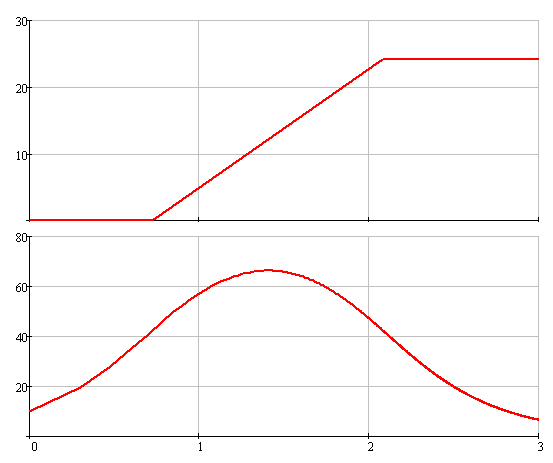
Рисунок 5.2 ЛПЧХ ДКУ
5.4 Построение переходной и весовой функции
Реакция звена на сигнал 0[k] называется весовой функцией. Математическое описание данного сигнала имеет вид
0[k]= |
1, k = 0; |
0, k 0. |
График весовой функции можно получить по разностному уравнению 5.1, считая, что
![]()
На рисунке 5.3 показаны два способа нахождения весовой функции: через разностное уравнение 5.1 и через обратное z-преобразование произведения z-изображений передаточной функции (3.2) и 0[k] функции.
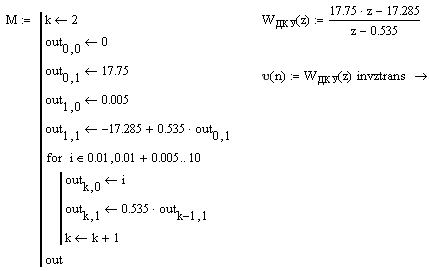
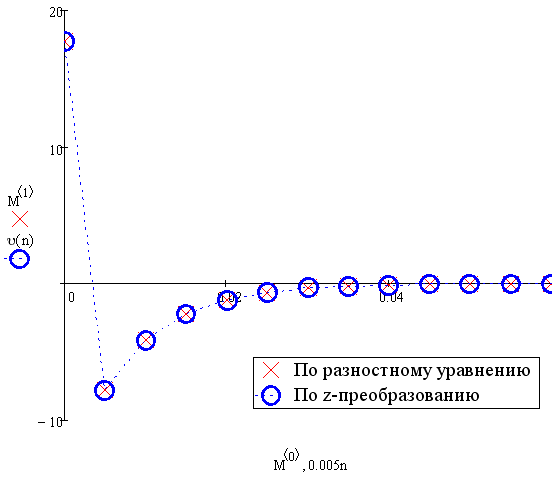
Рисунок 5.3 Весовая функция ДКУ
Переходной функцией называется реакция звена на сигнал 1[k], который принимает значение равное единице при любом k большим или равным нулю. Ее можно получить несколькими способами, но в пределах данного раздела мы воспользуемся следующими двумя: выполнив обратное z-преобразование следующего выражения

воспользовавшись связью переходной и весовой функций
![]()
где W[m] – весовая функция.
На рисунке 5.4 показана переходная функция ДКУ. Для построения вторым способом мы воспользовались данными из массива M, в который выше записывали значения весовой функции.

Рисунок 5.4 Переходная функция ДКУ
6Исследование замкнутой и разомкнутой системы
6.1 Исследование разомкнутой системы
Построим ЛПЧХ разомкнутой ДСАР и ЛЧХ системы-прототипа на одной плоскости и замерим необходимые показатели. Всю работу будем проводить в Mathcad.
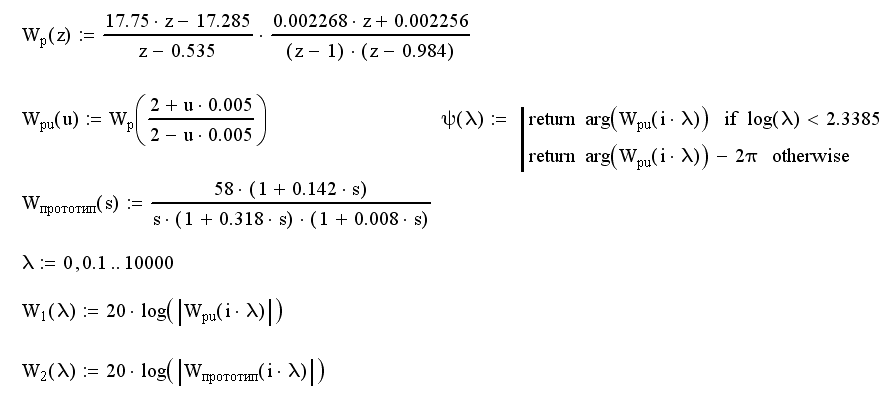
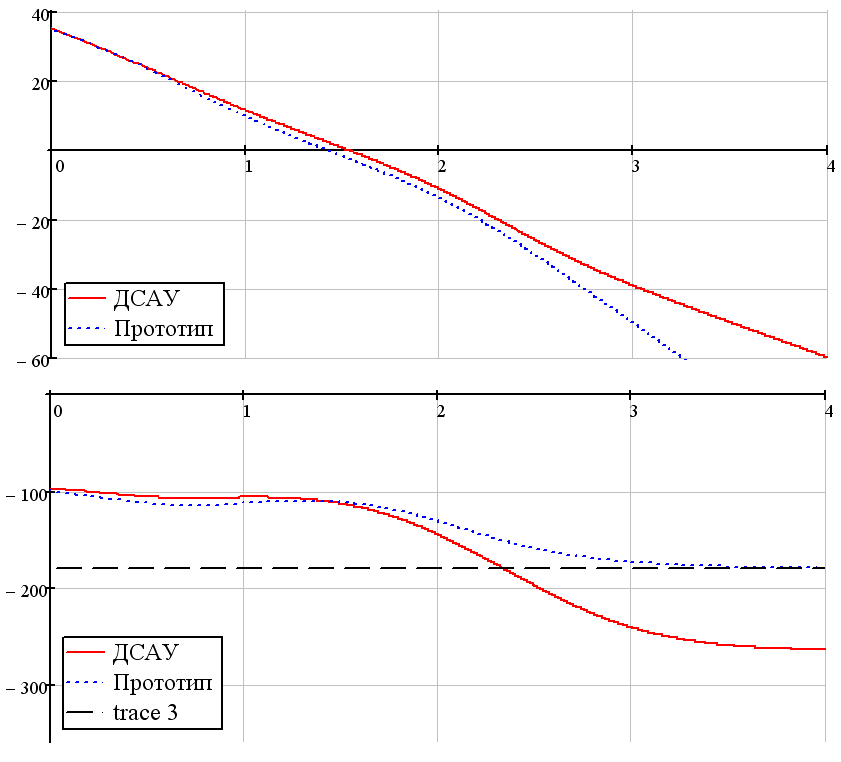
Рисунок 6.1 ЛПЧХ ДСАР и ЛЧХ прототипа
По характеристикам рисунка 6.1 сведем в таблицу 6.1 интересующие нас показатели
Таблица 6.1
|
Критическая частота, дек |
Частота среза, дек |
Lзап, дБ |
зап, градусы |
ДСАР |
2,34 |
1,53 |
21,24 |
66 |
Прототип |
|
1,42 |
–– |
70 |
Определим критический коэффициент ДСАР, для чего воспользуемся следующим расчетным выражением
![]() .
.
6.2 Исследование замкнутой системы
Сначала найдем показатели для системы-прототипа. Передаточная функция системы-прототипа с учетом (1.3) имеет вид
![]()
Определим нули и полюса системы прототипа, воспользовавшись Mathcad
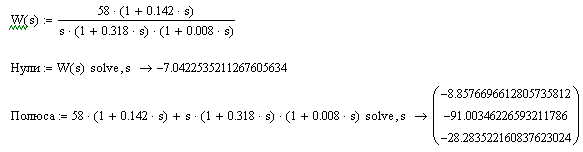
Откуда
![]()
В нахождении нулей и полюсов для ДСАР имеется отличие, которое заключается в использовании следующих соотношений [2, стр. 64]

Воспользуемся передаточной функцией (4.1) и рассчитаем нули и полюса
![]()


Откуда для ДСАР показатели следующие

Построим АЧХ для замкнутой ДСАР и замкнутой системы-прототипа (рисунок 6.2).
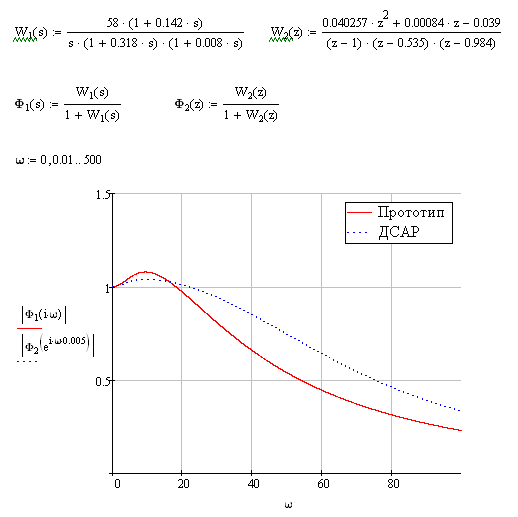
Рисунок 6.2 АЧХ системы-прототипа и ДСАР
По рисунку 6.2
![]()
Построим переходные характеристики для замкнутых систем, для чего воспользуемся возможностью обратного преобразования Лапласа и обратного z-преобразования (Рисунок 6.3).

Рисунок 6.3 Переходные характеристики
Для сравнения сведем все результаты в таблицу 6.2.
Таблица 6.2 Показатели качества ДСАР и системы-прототипа
Показатель |
ДСАР |
Система-прототип |
|
5,672 |
8,858 |
|
0,578 |
0 |
M |
1,041 |
1,080 |
tp, c (5 %) |
0,11 |
0,24 |
% |
5,39 |
8,23 |
По сравнительной таблице 6.2 ДСАР обладает лучшими прямыми показателями и лучшим показателем колебательности, чем система-прототип, но худшими корневыми показателями.