

Дискретные по времени функции и разностные уравнения(Шидловский с.В. Сказал, что по этой теме скорее всего будет задавать вопросы Светлаков а.А.)
Дискретность (и следовательно, разрывность) сигналов обусловлена их квантованием по уровню и/или времени. В противоположность непрерывным функциям времени, дискретные сигналы могут принимать дискретные значения в дискретные моменты времени.
Дискретные сигналы во временной области представляют собой последовательность импульсов, появляющиеся в определённые моменты времени. Обычно дискретный сигнал получают в результате периодического прерывания непрерывного сигнала с постоянным тактом. Существуют разные способы модуляции отдельных импульсов входящих в последовательность. Они отличаются допустимыми значениями амплитуд, шириной импульсов и модулирующей частотой. В цифровых системах управления обычно применяется лишь ампл. модуляция. Причем в том её варианте, при котором высота импульса пропорциональна текущему значению непрерывного сигнала, ширина постоянна, а интервалы между импульсами одинаковы и равны такту квантования.
Дискретный сигнал – сигнал дискретный по времени, но не квантованный по уровню.
Сигнал, дискретный по времени и квантованный по уровню – цифровой сигнал.
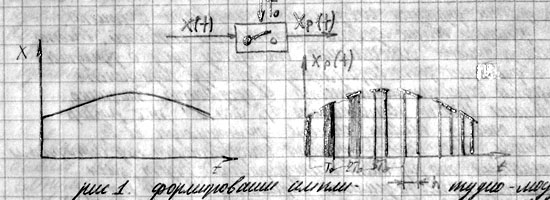
Формирование амплитудно-модулированного дискретного сигнала путем пропускания непрерывного сигнала через ключ с периодом квантования T0.
Поскольку к дискретным сигналам применим принцип суперпозиции, они описываются линейными соотношениями аналогичными по форме уравнениям линейных динамических систем
Xт=X(kT), при t=kT0
Xт=0 при kT0 < t < (k+1)T0 k=1,2,3…
Разностные уравнения
Аналогом дифференциальных уравнений для импульсной системы является уравнение в конечных разностях или разностное уравнение (РУ). При использовании прямых разностей неоднородные лин. разностные уравнения имеют вид:
![]() (здесь
все дельты вот такие ∆)
(здесь
все дельты вот такие ∆)
f[n]- заданная, а y[n]-искомая решетчатые функции. При f[n]Ξ 0 уравнение становится однородным разностным уравнением, решением которого будет y[n].
Так же его можно представить в другом виде:
a0y[n+m] + a1y[n+m-1] +…+ amy[n] = f[n] (1)
При использовании обратных разностей уравнение в конечных разностях будет:
Либо в другом виде:
a0y[n] + a1y[n-1] +…+ amy[n-m] = f[n] (2)
Разностные
уравнения можно рассматривать как
рекуррентные соотношения, позволяющие
вычислять значения
 при
при
 для
заданных начальных значений y[0], y[1],
…, y[m-1] и
уравнения вида (1) или значения y[n]
при n=0,1,2… для заданных
начальных значений
для
заданных начальных значений y[0], y[1],
…, y[m-1] и
уравнения вида (1) или значения y[n]
при n=0,1,2… для заданных
начальных значений и уравнения вида (2).
и уравнения вида (2).
Общее
решение однородного разностного
уравнения:
 ,
где z – корни характеристического
уравнения a0zm+a1zm-1+…+am=
0, а Ci-
произвольные постоянные.
,
где z – корни характеристического
уравнения a0zm+a1zm-1+…+am=
0, а Ci-
произвольные постоянные.
Z-преобразование
Математическое
описание и анализ импульсной системы
с амплитудной модуляцией существенно
упрощается, если все сигналы в системе
(как в импульсной, так и в непрерывной)
рассматриваются только в дискретные
моменты времени
 .
При этом каждый непрерывный сигнал x(t)
удобно представлять в виде решетчатой
функции времени x(kT),
значения которой определяемы только
для дискретных моментов времени.
.
При этом каждый непрерывный сигнал x(t)
удобно представлять в виде решетчатой
функции времени x(kT),
значения которой определяемы только
для дискретных моментов времени.
 (у x вместо 0 должна быть*)
(у x вместо 0 должна быть*)
Между
дискретными значениями аргумента t
функция
 равна нулю. Непрерывная функция x(t)
является огибающей для решетчатой
функции
,
и каждому конкретному сигналу x(t)
соответствует вполне определенный
сигнал
.
Часто удобнее переходить к относительному
времени
равна нулю. Непрерывная функция x(t)
является огибающей для решетчатой
функции
,
и каждому конкретному сигналу x(t)
соответствует вполне определенный
сигнал
.
Часто удобнее переходить к относительному
времени
 (тождественно
равно), измерять время числом периодов
квантования. В этом случае относительный
период
(тождественно
равно), измерять время числом периодов
квантования. В этом случае относительный
период
 ,
а решетчатая функция обозначается x(k).
,
а решетчатая функция обозначается x(k).
П оследовательность
неединичных импульсов, образующих
решетчатую функцию на интервале
оследовательность
неединичных импульсов, образующих
решетчатую функцию на интервале
 ,
можно представить в виде бесконечного
ряда (т.е. последовательности идеальных
импульсов).
,
можно представить в виде бесконечного
ряда (т.е. последовательности идеальных
импульсов).
(у икса вместо 0 должна быть *)
где
 -
смещенная дельта-функция(«идеальные»
импульсы), существующая только в моменты
времени
-
смещенная дельта-функция(«идеальные»
импульсы), существующая только в моменты
времени
 и равная нули при всех других значениях
t.
и равная нули при всех других значениях
t.
П рименяя
к сумме (17) преобразование Лапласа с
учетом, что изображение суммы оригиналов
равно сумме их изображений, а так же,
что согласно теореме запаздывания,
изображение смещенной дельта-функции
равно exp(-p/kT0),
тогда изображение решетчатой функции
(17) по Лапласу:
рименяя
к сумме (17) преобразование Лапласа с
учетом, что изображение суммы оригиналов
равно сумме их изображений, а так же,
что согласно теореме запаздывания,
изображение смещенной дельта-функции
равно exp(-p/kT0),
тогда изображение решетчатой функции
(17) по Лапласу:
Выражение (18) – дискретное преобразование Лапласа. С целью получения передаточный функций импульсных систем в дробно-рациональной форме, свойственной непрерывным системам, целесообразна замена аргументов
 ,
и тогда
,
и тогда
 И тогда вместо (18) получают более удобное
преобразование:
И тогда вместо (18) получают более удобное
преобразование:
19 – z-преобразование решетчатой функции.
Смысл заключается в том, что в последовательности чисел ставится в соответствие функция комплексной переменной z, определяемая выражением (19). X(z) определена только для тех значений z, для которых ряд (19) сходится.
Z-преобразование играет для дискретных сигналов такую же роль, как и преобразование Лапласа для аналоговых. Определяющим при этом является тот фактор, что z-преобразование импульсной характеристики дискретной системы является дробно-рациональной функцией переменной z.
Главное достоинство – простота выполнения прямого и обратного преобразования:
1 – чтобы по известной функции времени x(t) найти ее z-преобразование, необходимо лишь каждое дискретное значение x(kT0) умножить на z-k, а затем свернуть степенной ряд в конечную сумму;
2 – чтобы по известному изображению X(z) найти соответствующий сигнал x(t), необходимо представить изображение X(z) в виде степенного ряда по убывающим степеням z-k, получившееся при это числовые коэффициенты ряда и есть дискретные значения x(kT0) сигнала x(t).