

5. Реализация обучаемых систем управления
5.1. Варианты физической реализации обучаемых систем управления
Принципы построения и работы обучаемых систем управления могут быть реализованы на основе различных физических принципов. Эти системы могут быть оптическими, электрическими, механическими, гидравлическими, пневматическими и т.д. Кстати, можно найти аналогию в работе большинства (если не всех) существующих систем с работой обучаемых систем управления. Например такая механическая система, как замок и ключ может рассматриваться как механическая обучаемая система, в которой положение пластин замка (они играют роль рецепторов), при которой он открывается, определяют целевую ситуацию, а участки профиля ключа аналогичны весовым коэффициентам. Наложение целевой ситуации на эти весовые коэффициенты дает выход, результат – замок открывается. Формирование требуемого профиля ключа в этом примере – своего рода процесс обучения. Программируемые системы управления (ЧПУ) – тоже можно рассматривать как частный случай обучаемых систем с единственным датчиком (рецептором) времени, у которой для каждого такта (отрезка времени) программного цикла – свои весовые коэффициенты для исполнительных двигателей, определяющие движение всего управляемого механизма, робота или станка.
Математическая модель обучаемой системы управления, основной частью которой является расчет весовых коэффициентов признаков образов ситуаций, имеет самостоятельное значение, т.к. позволяет использовать дискретные системы (компьютеры, системы числового программного управления и др.) в режиме обучаемых систем. Это может быть использовано как для практического управления каким-либо объектом, так и для моделирования такого управления на компьютере. Такое моделирование позволяет выбрать ситуации обучаемой выборки, менять их и увидеть результат обучения, что ускоряет обучение реального объекта. И, что особенно важно для разработчиков и исследователей обучаемых систем управления, математическая модель позволяет изучать закономерности процесса обучения и работы таких систем. Так, многие результаты, представленные в данной работе, были получены благодаря использованию математической модели. Программный вариант обучаемой системы управления может быть реализован как на универсальной вычислительной технике так и с использованием специализированных процессоров, предназначенных для расчета весовых коэффициентов в процессе обучения и для расчета выходных сигналов в ходе управления объектом. К недостаткам использования цифровых технологий для реализации обучаемых систем управления можно отнести потери времени на опросы рецепторов и расчеты сигналов управления, а также относительно высокая стоимость таких систем, поэтому для реального управления объектами предпочтительнее аналоговые обучаемые системы. Электрический аналоговый вариант – наиболее удобный и простой способ реализации обучаемых систем управления. Этот вариант и был использован нашей научной группой для первых практических реализаций. Роль весовых коэффициентов при этом могут выполнять, кроме резисторных элементов, элементы с зарядовой связью, электролитические и т.д. Роль рецепторов могут выполнять как элементы, изменяющие свои проводимости под внешним воздействием, так и активные элементы, перерабатывающие энергию внешнего воздействия в электрическую. Весовые коэффициенты могут быть реализованы не только в виде электрической проводимости, но и в виде оптической, гидравлической или пневматической проводимости. Особенность таких систем в том, что они устойчивы к ионизирующим излучениям и электромагнитным полям, т.е. могут использоваться в таких условиях, как, например, при аварии на атомных электростанциях. Рецепторы обучаемых систем управления могут изготавливаться чувствительными не только к видимому свету, звуку, силовому воздействию и другим традиционным внешним воздействиям, но и к ионизирующему излучению, радиоволнам, инфракрасному и ультрафиолетовому излучениям и другим видам внешнего воздействия, не воспринимаемого человеком. Это позволяет использовать объекты, оснащенные обучаемыми системами управления там, где человеку находиться опасно.
Рассмотрим некоторые разработанные варианты реализации обучаемых систем управления. Оптический вариант обучаемой системы управления [76] характеризуется наглядностью того, что ее технический мозг, выполненный в виде фотопозитивов на прозрачной подложке, не содержит определенных образов, эталонов и т.д., а имеет некое абстрактное изображение, сформированное в результате многократного обучения (экспонирования и проявления) во всех ситуациях обучаемой выборки. На рис.5.1 представлена схема обучаемого оптического устройства управления для отдельного исполнительного органа.
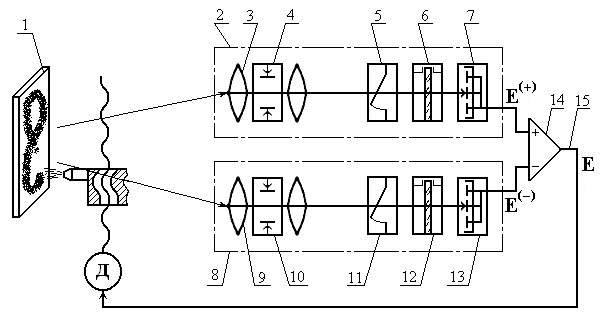 Рис.5.1.
Схема оптической обучаемой системы
управления для одного исполнительного
двигателя
Рис.5.1.
Схема оптической обучаемой системы
управления для одного исполнительного
двигателя
Устройство, реагирующее на некоторую ситуацию (зрительный образ 1), содержит два оптических канала – плюс-канал 2, содержащий последовательно оптически связанные первый объектив 3 с регулируемой диафрагмой 4, первый оптический затвор 5, первый блок 6 памяти и первый многоэлементный фотоприемник 7, и минус-канал 8, содержащий последовательно оптически связанные второй объектив 9 с регулируемой диафрагмой 10, второй оптический затвор 11, второй блок 12 памяти и второй многоэлементный фотоприемник 13. Устройство содержит также элемент 14 сравнения, входы которого подключены соответственно к выходам первого и второго фотоприемников 7, 13, а выход элемента сравнения является выходом 15 устройства. Блоки 6 и 12 памяти представляют собой фотопозитивы на прозрачной подложке. Диафрагмы 4, 10 регулируемые, а фотозатворы 5, 11 нерегулируемые, т.е. их временная выдержка постоянна. Сигнал управления Е на выходе устройства подают на конкретный исполнительный орган (элемент перемещения). Для системы из нескольких исполнительных органов используют столько же пар оптических каналов с полным набором входящих элементов. В процессе обучения используют память основную и ее непроявленный дубль. Основной памятью является фотопозитив на прозрачной подложке, экспонированный и проявленный. Дубль памяти представляет собой также позитив на прозрачной подложке, его снимают с того же основного фотопозитива путем, например, контактного экспонирования, но дубль не проявляют для того, чтобы была возможность откорректировать память путем наложения на нее в процессе обучения корректирующего изображения. После проявления дубль становится основной памятью. Перед обучением производят дискретизацию рабочего цикла по отдельным исполнительным органам объекта управления, по ситуациям цикла и по элементам зрительного образа. Для этого выделяют из общего процесса движения (из многомерного пространства движения объекта управления) одномерное движение отдельного исполнительного органа, которое однозначно определяется скалярной величиной сигнала управления Е, формируемого на выходе 15 устройства. Непрерывное изменение видимой сцены на всем протяжении рабочего цикла условно разбивают на зрительные образы (ситуации) и нумеруют их. Зрительное поле (световое поле оптических каналов 2, 8) разбивают на отдельные участки и нумеруют их. Эти участки должны соответствовать апертурам соответствующих фотоэлементов многоэлементных фотоприемников 7, 13. Точно также условно необходимо разбить на такие же отдельные участки поле блоков 6, 12 памяти. Считается, что зрительные образы обоих оптических каналов в одной и той же ситуации одинаковы. Нумерация участков зрительного поля, полей блоков памяти и фотоэлементов многоэлементных фотоприемников обоих оптических каналов должна совпадать. Устройство готово управлять исполнительным органом в том случае, если определены оптические проводимости Cj всех участков обоих блоков 6, 12 памятей, т.е. определены изображения фотопозитивов. Фотографическая память обучаемого оптического устройства управления представляет собой не пространственный накопитель с программой действий, а оптический преобразователь, единственный на все случаи в работе объекта управления, который содержит совокупную информацию всего процесса обучения. В этой памяти могут накапливаться знания в виде абстрактного изображения для решения не одной, а многих задач: обученное для выполнения одних действий, устройство можно дообучить для выполнения других действий, третьих и т.д., т.е. можно расширять круг решаемых задач. Одна и та же оптическая система управления может использоваться для решения нескольких задач, если использовать при обучении и работе мозаичные оптические фильтры с различной прозрачностью участков.