

3.4. Обучаемая система управления с парными рецепторами
Как известно [42], в глазах животных имеются рецепторы двух типов: первые реагируют на увеличение освещенности, а другие – на уменьшение. Цель данной разработки [80] – расширение информационных возможностей технических органов чувств путем введения рецепторов с противоположным возбуждением. Параллельно с каждым рецептором очувствления, возбуждающимся при усилении внешнего воздействия на него, устанавливается другой, электрический ток через который увеличивается при ослаблении внешнего воздействия на первый рецептор. Таким образом, этот другой рецептор имеет противоположное возбуждение по отношению к первому. Все дополнительные рецепторы с противоположным возбуждением совмещены со строчными шинами технического мозга и формируют сигналы управления системы наравне с основными рецепторами. Технический орган чувств, оснащенный дополнительными рецепторами с противоположным возбуждением, способен реагировать не только на увеличение внешнего воздействия на него, но и на уменьшение. Таким образом расширяются информационные возможности технических органов чувств. Так, например, обучаемая система управления с техническим глазом, имеющим дополнительные рецепторы с противоположным возбуждением, способна формировать управляющие сигналы не только под воздействием светлых пятен обозреваемых сцен, но и темных. Дополнительные рецепторы с противоположным возбуждением могут быть также в технической коже, в техническом ухе и т.д. В технический мозг включены дополнительные строчные шины по числу рецепторов очувствления. Каждая дополнительная строчная шина соединена со входом отдельного рецептора очувствления через резистор, который образует с соответствующим рецептором пару и выполняет по отношению к нему функции рецептора с противоположным возбуждением. Каждая такая пара подключена к источнику питания через дополнительный резистор, предназначенный для стабилизации тока в этой паре. На рис.3.4 представлена принципиальная схема обучаемой системы управления. Она содержит технические органы чувств 1, состоящие из наборов рецепторов очувствления 2, технический мозг 3 в виде матрицы аналоговых резисторных элементов 4, строчные шины которой совмещены с рецепторами очувствления 2, а столбцовые шины 6 и 7 объединены попарно, и усилители 8, со входами каждого из которых соединены отдельные парные столбцовые шины 6 и 7. Каждая столбцовая шина имеет нагрузочный резистор 9. Выходы 10 усилителей 8 являются выходами системы на управляемые исполнительные органы. Технический мозг 3 включает еще одну группу строчных шин 11, совмещенных с выходами 10 системы. В технические органы чувств 1 системы введены дополнительно резисторы 12, каждый из которых встроен в цепь между входом отдельного рецептора очувствления 2 и дополнительной отдельной строчной шиной 13 технического мозга 3. Отдельный рецептор очувствления 2 с отдельным резистором 12 образует пару, которая через резистор 14 подключена к источнику питания 15. На схеме изображены также формирователь импульсов 16, подключенный к клемме повышенного напряжения источника питания 15, и переключатель 17, дающий возможность подключать формирователь импульсов 16 к столбцовым шинам 6 и 7 технического мозга 3 в процессе обучения системы.
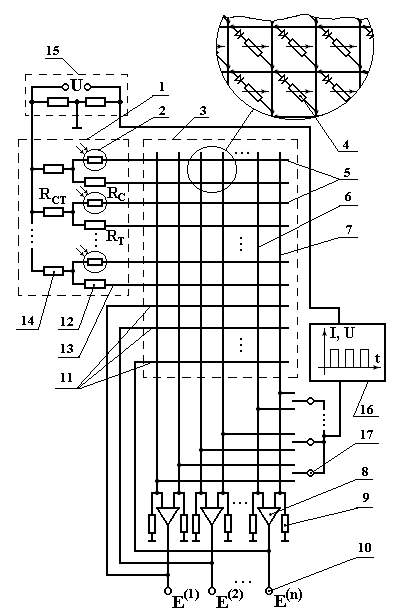 Рис.3.4.
Схема обучаемой системы с парными
рецепторами
Рис.3.4.
Схема обучаемой системы с парными
рецепторами
На схеме указаны обозначения: U – напряжение источника питания 15; Rст – сопротивление резистора 14, стабилизирующего ток соответствующей пары: рецептора очувствления 2 и резистора 12; Rс – сопротивление рецептора очувствления 2; Rт – сопротивление резистора 12; E(1), E(2), ... , E(n) – сигналы управления исполнительными органами объекта управления (на схеме исполнительные органы не показаны) (индекс вверху обозначает порядковый номер исполнительного органа); n – общее количество исполнительных органов; I(t), U(t) – генерация импульсов тока (напряжения).
Результирующий сигнал управления Ef(k) каждой в отдельности пары столбцовых шин 6 и 7 в конкретной ситуации j образуется как сумма элементарных долей eij , подаваемых рецепторами 2 и 12 и дополнительно выходами 10 через группу строчных шин 11:

где: eij(с) – доля сигнала управления от светового активного резистора (фоторезистора); eij(т) – доля сигнала управления от темнового пассивного резистора.
Если внешнее воздействие на какую-то группу активных рецепторов 2 окажется малым, то их вклад (их долевое участие) в результирующий сигнал управления Ef(k) окажется также малым и почти независящим от соответствующих проводимостей ci. В этом случае активные рецепторы 2 оказываются как бы отстраненными от управления объектом. И только введение пассивных рецепторов 12 устраняет этот недостаток. Все пассивные рецепторы 12, парные со слабо возбужденными активными рецепторами 2, подадут на соответствующие строчные шины 13 повышенные напряжения и тем самым примут активное участие в формировании результирующего сигнала управления. На примере обучаемой системы управления с техническим глазом это означает, что объект управления будет соответствующим образом реагировать не только на светлые пятна обозреваемых сцен, но и на темные. Это позволит решать задачи поиска-уклонения как с предметами более светлыми чем фон, так и более темными, а также работать с предметами, имеющими участки темнее и светлее фона. Парными пассивными рецепторами 12 могут быть дополнены активные рецепторы осязания и давления технической кожи, которой могут быть покрыты, например, ладони схвата робота. Информационные возможности технической кожи при этом расширятся, и обучаемая система управления сможет принимать более сложные решения при захвате или ощупывании предметов. Установка резисторов 14, стабилизирующих ток в парных рецепторах 2 и 12, кроме своего основного назначения нейтрализует пробои рецепторов. Без таких резисторов в случае пробоя любого рецептора доля его в общем сигнале управления сильно возрастала бы, и это выводило бы из строя всю систему. При наличии резисторов 14 этот дефект почти полностью устраняется.