

4.4 Amortiseerimine.
Maandumine peab olema amortiseeritud ja selle pärast me kasutame pallid, mida võib kaupluses osta. Pall on tehtud paraloonist ja kummist.

Pic. 9 Amortiseerimise struktuur.
Punane on paraloon, rofeline on kuum. Paraloon on kerge ja annab amortiseerimist, kumm ei anna paralooni voolu.

Pic. 10 Reaalne jalgade kuju.
Sellisek fotol on näha kuidas jalad välja näevad.
4.5 CNC
CNC abil lõikasime alümiiniumi ja plastiku lehe. Sllega olid suured problemid, mille lahendusega aitasid õpejõud ja teised meeskonnad. Vaid pärast õpisime ise normaalselt töötama. CNC abil ka valmistasime elektriplaadi.

Pic. 11 CNC elektroplaadi lõikumine.
Selline foto oli tehtud, kui me valmistasime elektriplaadi.
4.6 3D mudel ja reaalne mudel.


Töölõppus tuli välja selline mudel, mis oli planeeritud.
4.7 Simulatsioon
Kontrollime kas on võimalik lennata maksimaalse kaluga kalkulaatori abil.
http://www.ecalc.ch/xcoptercalc_e.htm - link kalkulaatorile.


Simulatsioon näidis, et kopter peab lendama. Simulatsioonis on kasutatud maksimaalne kalu. Reaalne kalu on umbes 1 kg.
4.8 Tegemata töö.
Ei jõudsime aku kinnitada, sest ei saanud aku kätte, sest elektriskeem sai lõpuni ainult viimasel hetkel. Plaanis oli ka teha tiibu kaitse, vaid sellele aega ka ei leidnud.
4.9 Edasiarendamise võimalused
Plaanis oli ka kasutada 10 inch tiibud, sest nendega staabilsus on parem, vaid oli jäänud ainult 8 inch tiibud. Võib ka teha toitejaotuseplaadile amortiseerimise süsteemi ja tiibe kaitse.
Elektroonika. Eagle Cad.
5.1 Algus.
Projekteerimise alguses me kavatsesime kasutama motoorikontrollerite toitejaotusplaadi «UP 4x power distribution board». See oleks mugavam, vaid ebaratsionaalne ruumi kasutamine, sest selles juhus oli vaja ka teine toitejaotusplaat sensoriplaadi ning arendusplaadi jaoks. Siis me otsusime paigaldada kõik elemente ühes plaadis ning alustasime projekteerima seda Eagle Cadis.
Pic.1. UP 4x power distribution board
Kõigepealt me uurisime, kuidas töötavad elemendid ning nende ühendamine arendusplaadiga. Mootori kontrollerid ning sensoriplaat töötab I2C protokooliga, sellepärast me valime sobivaid sisendeid kontrolleril. Samuti sai uuritud raadioside vastuvõtja.
Kui me saime
teadma, mis on elementide eesmärgid ja nende PIN-id, siis me
alustame projekteerima skeemi Eaglis.

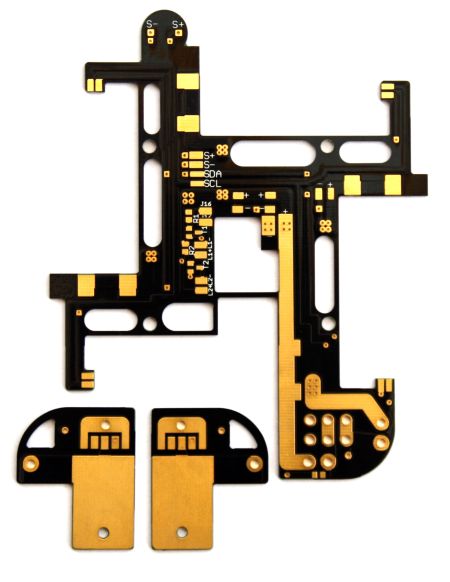
Pic.2. Toitejaotusplaadi lõplik skeem
Mõned elemendid me tegime Eaglis ise, sest see oli meile mugavam ning aitas meile elementide uurimises. Kui me alustasime looma oma elemindid, reaalne PIN-i paigaldus elementis ei ole läbi mõeldud, ja pärast see põhjustas mingid probleemid. Elementide skeemid oli tehtud uuesti arvestades naturaalseid mõõtmeid.
Olid valitud 5V pingimuutuja ning kondensaatoreid. 5V toite on ühendatud arendusplaadiga. Kondesaatorid on vajalikud stabiilsuse tagatiseks. Samuti arendusplaat võib anda 3.3V väljundil, siis me kasutame seda sesnsoriplaadi toite tagamiseks.