

Выбор вентилей
Выбор вентилей производится по среднему значению тока и наибольшему обратному напряжению.
m=3 – коэффициент, зависящий от схемы выпрямления.
Среднее значение тока через вентиль:
![]() (15),
(15),
Кз=2,2 – коэффициент запаса, выбирается в зависимости от возможных перегрузок.
Номинальный ток вентиля:
![]() (16),
(16),
Кз=1,07 – коэффициент запаса, учитывающий разброс параметров трансформатора,
номинальное обратное напряжение:
![]()
(17). Номинальное напряжение вентиля:
![]() (18).
(18).
Выбираем вентили типа Т25-4. (Тиристоры с номинальным током 40 А и допустимым обратным напряжением не ниже 800 В).
Расчёт параметров якорной цепи.
Индуктивность якорной цепи рассчитывается, исходя из условия, что величина пульсаций тока не должна превышать 2–5%. Это диктуется условиями проектирования электродвигателей.
Наиболее допустимая величина переменной составляющей выпрямленного тока:
![]() (19).
(19).
Требуемая индуктивность якорной цепи:
![]() (20),
(20),
где: fn – частота пульсаций выпрямленного тока, Гц, определяется, исходя из схемы выпрямления.
Здесь реактивное сопротивление якорной цепи:
 (21).
(21).
Общая индуктивность двигателя и трансформатора меньше, чем требуемая, поэтому в якорную цепь необходимо включить сглаживающий дроссель с индуктивностью
![]() (22).
(22).
Активное сопротивление якорной цепи складывается из сопротивлений якоря двигателя, трансформатора, сглаживающего дросселя и коммутационного сопротивления, учитывающего коммутацию тока в вентилях.
Коммутационное сопротивление:
![]() (23).
(23).
Активное сопротивление якорной цепи:
![]() (24),
(24),
где:
![]() Ом
(25),
Ом
(25),
Rсд – сопротивление сглаживающего дросселя.
Расчёт параметров системы управления
По уравнению
![]() построена характеристика преобразователя.
построена характеристика преобразователя.
Еdo – наибольшая величина выпрямленной ЭДС.
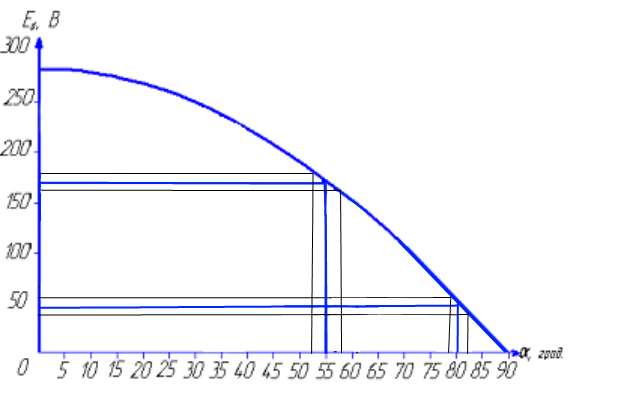
Рис. 2. Статическая регулировочная характеристика тиристорного преобразователя.
На верхней границе диапазона регулирования:
![]() (26), (рис. 2.),
(26), (рис. 2.),
что соответствует
углу регулирования α΄=55˚. Берем
приращения
![]() и
и
![]() (рис.
2).
(рис.
2).
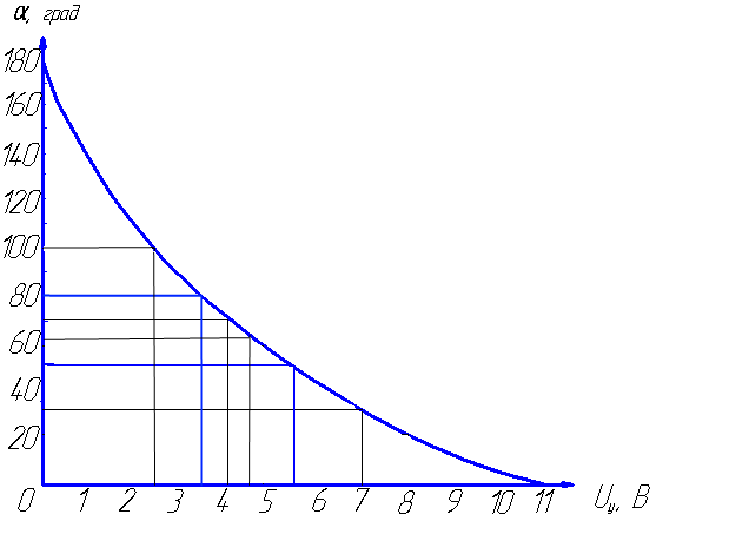
Рис. 3. Статическая характеристика СИФУ.
Коэффициент передачи преобразователя:
![]() (27).
(27).
Для данного значения
α΄=55˚,
![]() .
Берем приращения
.
Берем приращения
![]() и
и
![]() (Рис. 3.).
(Рис. 3.).
Коэффициент передачи СИФУ:
![]() (28).
(28).
По каталожным данным определяем коэффициент передачи тахогенератора, встроенного в двигатель ПБСТ-63:
![]() (29),
(29),
Где:
![]() - номинальное
напряжение тахогенератора,
- номинальное
напряжение тахогенератора,
![]() - номинальная
угловая скорость тахогенератора.
- номинальная
угловая скорость тахогенератора.
Определяем общий коэффициент передачи системы в разомкнутом состоянии:
![]() (30).
(30).
Наибольшая статическая ошибка в разомкнутом состоянии:
![]() (31),
(31),
![]()
![]() (32),
(32),
![]() (33),
(33),
![]() (34),
(34),
где:
![]() - ошибка, вызванная соответственно
конечной жёсткостью механической
характеристики привода с разомкнутой
системой управления и колебаниями
напряжения в сети,
- ошибка, вызванная соответственно
конечной жёсткостью механической
характеристики привода с разомкнутой
системой управления и колебаниями
напряжения в сети,
ΔI2 - изменение тока,
ΔUС - наибольшая величина колебаний напряжения преобразователя, вызванных колебаниями напряжения в сети (0,5…2 В).
Колебания напряжения в сети приняты в пределах 5%. В замкнутом состоянии статическая ошибка уменьшается до величины:
![]() (35).
(35).
На нижней границе диапазона регулирования:
![]() (36),
(Рис. 2.),
(36),
(Рис. 2.),
что соответствует
углу регулирования α΄=80˚. Берем
приращения
![]() и
и
![]() (Рис. 2.).
(Рис. 2.).
![]() (37).
(37).
Для данного значения
α΄=80˚
![]() .
Берем приращения
.
Берем приращения
![]() и
и
![]() (Рис.
3.),
(Рис.
3.),
![]() (38),
(38),
![]() (39),
(39),
![]() (40),
(40),
![]() (41),
(41),
![]() (42),
(42),
![]() (43).
(43).
Определим требуемый коэффициент передачи всей системы в разомкнутом состоянии:
![]() (44).
(44).
Следовательно, коэффициент передачи промежуточного усилителя должен быть не менее:
![]() (45).
(45).