

Системы координат пр.
Системы координат ПР определяют его компоновочную схему и соответственно кинематику и форму рабочей зоны. Роботы могут работать в прямоугольной декартовой, цилиндрической, сферической, угловой и комбинированной системе координат (табл. ).
Табл.
Системы координат и примеры компоновки
Система координат |
Система основных координат перемещений |
Эскиз рабочей зоны |
Пример компоновки структурной кинематической схемы |
Прямоугольная плоская |
|
|
|
Прямоугольная пространствен- ная |
|
|
|
Полярная плоская |
|
|
|
Полярная сферическая |
|
|
|
Полярная цилиндрическая |
|
|
|
Угловая |
|
|
|
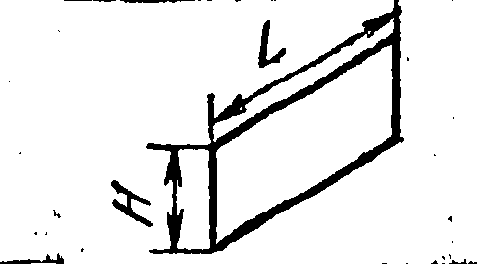

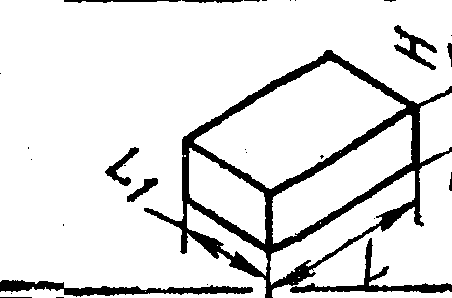
В прямоугольной (декартовой) системе координат звенья механической системы имеют прямолинейные перемещения по трем (или двум – при плоской системе) взаимно перпендикулярным осям X, Y, Z. Рабочая зона ПР имеет форму прямоугольника или параллелепипеда (размеры H, L, L1 определяют параметры рабочей зоны).
В плоской полярной системе координат
объект перемещается в одной координатной
плоскости и его положение определяется
величиной радиуса-вектора r
и углом поворота радиуса-вектора
 .
.
Цилиндрическая система координат характеризуется перемещением рабочего органа ПР в основном координатной плоскости в направлении r и , а также по координате Z. Рабочая зона в этом случае имеет форму цилиндра, размеры H, L и угол и определяет ее параметры.
Сферическая система координат
характеризуется перемещением рабочего
органа в точку пространства за счет
перемещений по радиусу-вектору r
и угловым перемещениями
и
 в двух взаимно перпендикулярных
плоскостях. Рабочая зона ПР имеет в этом
случае форму шара.
в двух взаимно перпендикулярных
плоскостях. Рабочая зона ПР имеет в этом
случае форму шара.
Угловая плоская или пространственная (цилиндрическая и сферическая)система координат характерна для движения многозвенных шарнирных рук ПР. Объект манипулирования перемещается в направлении радиуса-вектора r за счет относительных угловых поворотов звеньев руки, имеющих постоянную длину. Увеличивается число модулей так называемых «антропоморфных» ПР, имитирующих движение руки человека и работающих в угловой системе координат. Такие ПР имеют только вращательные пары, что увеличивает зону обслуживания, маневренность и функциональные возможности.
Типы приводов пр.
П
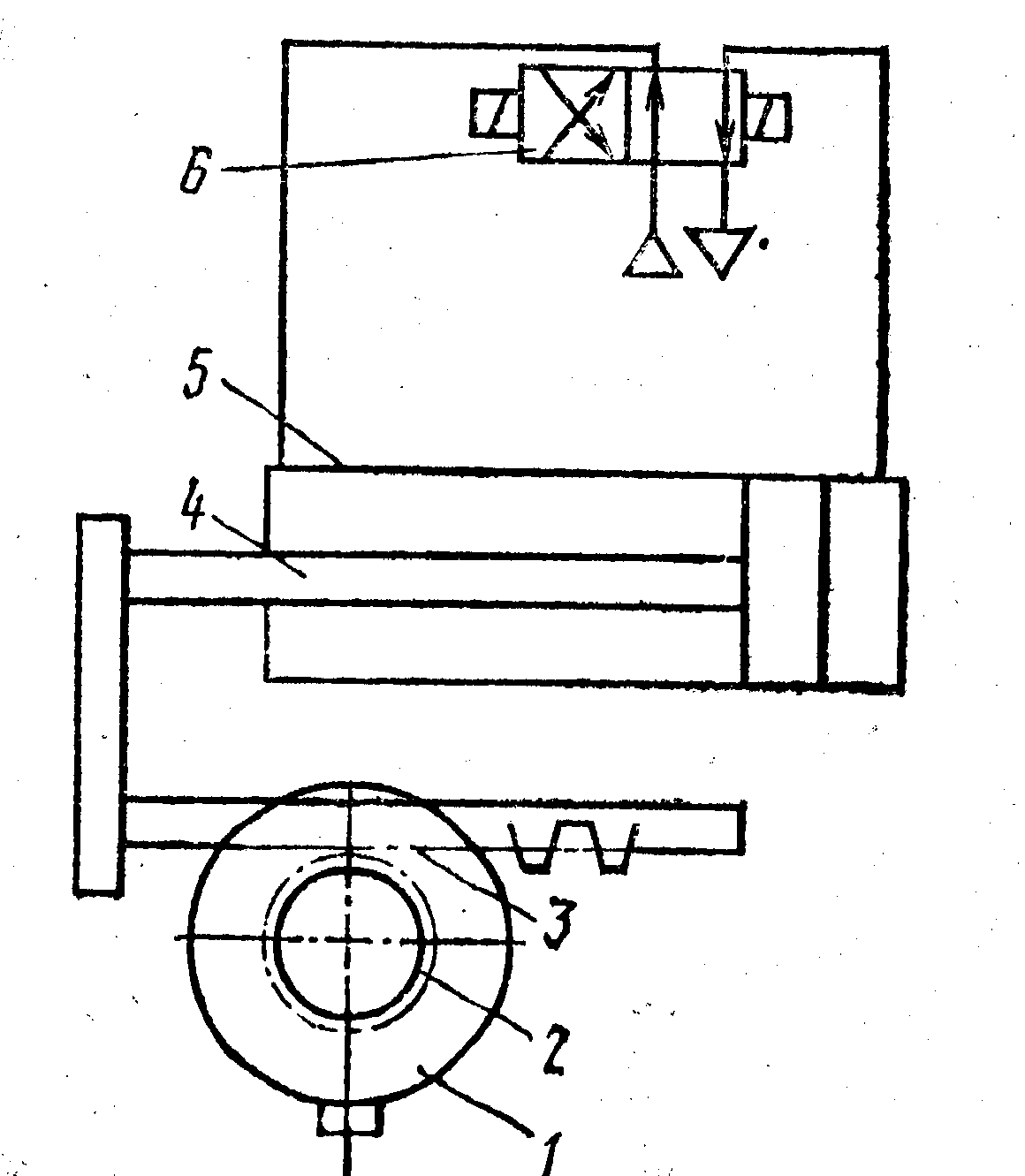
Рис.103-.Принципиальная схема позиционного пневмопривода ПР
Р выполняют с электромеханическим, гидравлическим, пневматическим и комбинированным приводом. Выбор типа привода определяется назначением ПР, его техническими характеристиками, в частности грузоподъемностью конструктивными особенностями, условиями эксплуатации, видом системы управления. Привод ПР должен иметь высокое быстродействие, минимально возможные габаритные размеры, высокую надежность, высокие энергетические показатели; обеспечивать точность позиционирования и возможность работы в режиме автоматического управления.Для упрощенных ПР с цикловым управлением и грузоподъемностью до 20 кг применяют пневмопривод. Преимущества пневмопривода – простота, надежность, высокая точность в режиме управления по упорам, возможность работы во взрывоопасных средах, в средах с повышенной запыленности, меньшая стоимость по сравнению с другими типами привода. Недостатки привода – низкий КПД, значительные колебания скорости исполнительных механизмов при изменяемой нагрузке. Принципиальная схема позиционного пневмопривода ПР представлена на рис.103. Шток 4 пневмоцилиндра 5, управляемого пневмораспределителем 6, передает движение через рейку зубчатому колесу 2. На одном валу с зубчатым колесом закреплен электромагнитный тормоз 1, изменением питающего напряжения которого регулируется тормозящий момент. При позиционировании датчик положения дает предварительную команду на торможение, затем за счет увеличения тормозного момента скорость привода сбрасывается «до ползучей» и происходит медленный подход к заданной точке позиционирования.
Для ПР с грузоподъемностью свыше 10 – 20 кг в основном применяют гидропривод. Гидропривод имеет высокую энергоемкость, быстродействие, стабильность скорости при изменяющейся нагрузке, малую инерционность, высокую точность позиционирования и т.д. Недостаток гидропривода – возможность утечек. В гидроприводах цикловых ПР в качестве исполнительных устройств применяют гидроцилиндры, гидродвигатели с ограниченным углом поворота выходного вала, гидромоторы. В ПР с числовыми системами ПУ используют электрогидравлические следящие приводы с линейными гидроцилиндрами или гидродвигателями, имеющие датчики обратной связи по положению. Могут применяться и электрогидравлические шаговые приводы, в этом случае звенья ПР оснащаются дополнительными датчиками положения.
Электропривод обладает высокой надежностью, точностью, бесшумностью, легкостью регулирования, простотой монтажа, уменьшением металлоемкости конструкций ПР. Наиболее подходят для ПР электродвигатели постоянного тока с возбуждением от постоянных магнитов, имеющие сравнительно высокие показатели удельной мощности. Используют для ПР электродвигатели с плоским ротором, малоинерционные высокомоментные электродвигатели, шаговые приводы с усилителями и силовые.
Э
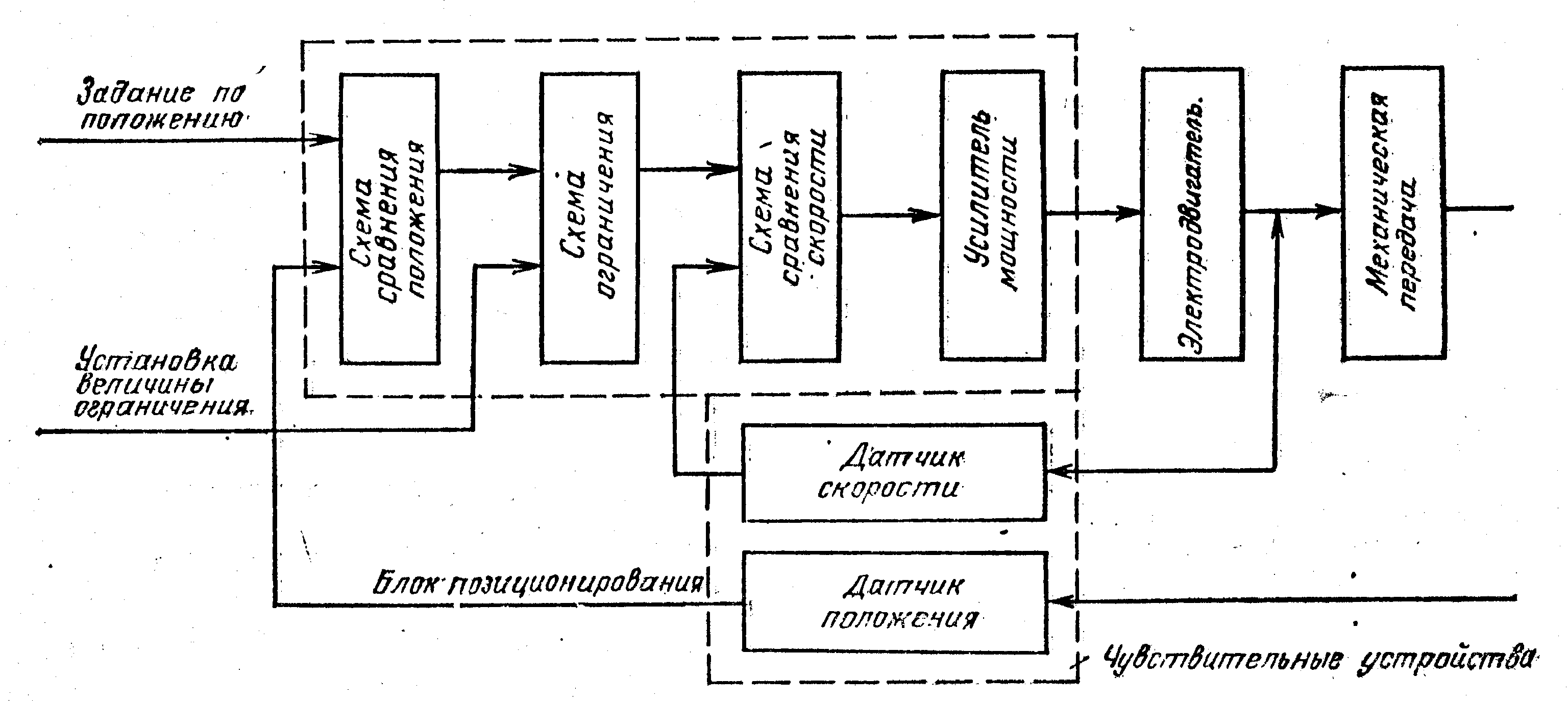
Рис.104--.Обобщенная схема электропривода промышленного робота.
лектропривод (рис.104) содержит механическую передачу, электропривод, чувствительные устройства в виде датчиков положения и скорости и блок позиционирования, включающий схему ограничения, определяющую максимальную скорость, и усилитель мощности.