

Матрично-векторные формы представления математических моделей. Получение, преобразование, исследование
Математические модели динамических систем в пространстве состояний
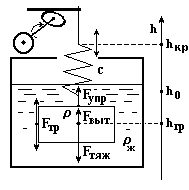
Рис. 1 Механическая система и переменные состояния
Математическая модель (ММ) динамической системы, полная по внутренним переменным. Есть груз массой ,
пружина с жесткостью
,
пружина с жесткостью
 ,
жидкостное трение с коэфф.
,
жидкостное трение с коэфф.
 .
Объект на рис. 1
с обозначениями:
.
Объект на рис. 1
с обозначениями:
 - силы тяжести, упругости пружины,
выталкивания и трения жидкости
соответственно;
- силы тяжести, упругости пружины,
выталкивания и трения жидкости
соответственно;
 - плотности груза и жидкости;
- плотности груза и жидкости;
 - положение крепления пружины и центра
тяжести груза, переменная
- положение крепления пружины и центра
тяжести груза, переменная
 независимое входное воздействие.
независимое входное воздействие.
(1)
![]() ,
где
,
где
![]() - действующие на груз силы определяемые
следующими выражениями:
- действующие на груз силы определяемые
следующими выражениями:
![]()
![]() .
Подставляя их в (1) и преобразуя, можно
получить уравнение
.
Подставляя их в (1) и преобразуя, можно
получить уравнение
(2) ![]() , где
, где
![]() и
и
![]() - номинальные координаты.
- номинальные координаты.
Уравнение (2) является «вход-выходной» формой записи дифференциального уравнения (ДУ).
Такая
форма ММ
не однозначно оценивает состояние
системы в произвольный момент времени
![]() и закон ее движения
и закон ее движения
![]() для
для
![]() при известных
при известных
![]() и
и
![]() .
Например, для различных начальных
значений
.
Например, для различных начальных
значений
![]() в (2) и для одних и тех же
и
решения уравнения будут разными.
Уравнения однозначно решаются при
дополнительном задании начальных
условий по производной
в (2) и для одних и тех же
и
решения уравнения будут разными.
Уравнения однозначно решаются при
дополнительном задании начальных
условий по производной
![]() .
.
Таким
образом, для полного описания состояния
исследуемой системы необходимо привлечь
к рассмотрению вторую переменную -
скорость
![]() .
Тогда уравнение (2) можно записать в
форме Коши
.
Тогда уравнение (2) можно записать в
форме Коши
(3) ![]()
Для
унификации математических исследований
в теории динамических систем принято
обозначать переменные, характеризующие
движение объекта через х.
Управляющее воздействие принято
обозначать
![]() .
Тогда, по обозначению, можно принять
.
Тогда, по обозначению, можно принять
![]() ,
,
![]() ,
,
![]()
![]() .
.
Тогда ММ (3) можно записать в единой матрично-векторной форме:
(4) ![]() ,
,
Поскольку
![]() и
и
![]() - переменные,
описывающие состояние
исследуемого объекта, вектор
- переменные,
описывающие состояние
исследуемого объекта, вектор
![]() ,
образованный этими переменными, называют
вектором
состояния (ВС)
динамической
системы (ДС).
Координаты ВС
в пространстве этих переменных, называемом
пространством
состояния (ПС),
однозначно определяют собственное
состояние
ДС,
дальнейшее ее самостоятельное
(собственное)
движение, а также, при известном входном
воздействии
,
образованный этими переменными, называют
вектором
состояния (ВС)
динамической
системы (ДС).
Координаты ВС
в пространстве этих переменных, называемом
пространством
состояния (ПС),
однозначно определяют собственное
состояние
ДС,
дальнейшее ее самостоятельное
(собственное)
движение, а также, при известном входном
воздействии
![]() ,
вынужденное
движение.
,
вынужденное
движение.
Сама система ДУ первого порядка (3) или (4) есть ММ в ПС для рассматриваемого объекта.
Математические модели ДС и представление переменных в приращениях. (Полученная выше ММ механической системы - классический пример изначально линейной ММ. Ее матрично-векторная форма представлена уравнением (4). Она получена и представлена в абсолютных физических единицах относительно выбранной при моделировании, в общем-то, совершенно произвольной точки в принятой системе координат, что привело к появлению в выражении дополнительной константы
 .
Естественно, такая неопределенность
при моделировании не слишком полезна,
приводит к внешне неодинаковой форме
результатов у разных исследователей
и, в некоторых случаях, приводит к
неудобствам при оценке количественных
результатов.
.
Естественно, такая неопределенность
при моделировании не слишком полезна,
приводит к внешне неодинаковой форме
результатов у разных исследователей
и, в некоторых случаях, приводит к
неудобствам при оценке количественных
результатов.
Другим поводом для обсуждения данного вопроса является часто используемое в теории управления преобразование Лапласа, позволяющее перевести в алгебраическую область многие математические операции над линейными ДУ. Это преобразование эффективно и позволяет пользоваться удобным аппаратом передаточных функций только при нулевых начальных значениях тех переменных, которые находятся под знаками дифференцирования.)
Эти
проблемы стимулировали в ТАУ
переход к приращениям
- приему преобразования ММ.
Он состоит в формульной замене переменных
на сумму их номиналов и варьируемы
добавок, называемых приращениями.
Таким образом, замена произвольной
переменной
![]() в преобразуемом уравнении производится
по формуле
(5)
в преобразуемом уравнении производится
по формуле
(5)
![]() ,
где
,
где
![]() - некоторое номинальное для исследуемого
режима функционирования ДС значение
переменной;
- некоторое номинальное для исследуемого
режима функционирования ДС значение
переменной;
![]() - ее переменная составляющая.
- ее переменная составляющая.
В
качестве
![]() выбирают характерное для ДС установившееся
значение переменной. В примере номиналом
входного воздействия удобно взять
средний для ДС
уровень крепления пружины
выбирают характерное для ДС установившееся
значение переменной. В примере номиналом
входного воздействия удобно взять
средний для ДС
уровень крепления пружины
![]() .
Тогда номинал положения груза получится
из уравнения статики ДС.
Его можно получить из ДУ
(3), из равенства нулю всех производных
- (6)
.
Тогда номинал положения груза получится
из уравнения статики ДС.
Его можно получить из ДУ
(3), из равенства нулю всех производных
- (6) ![]() .
Подставив (5) в (3) и обозначив
.
Подставив (5) в (3) и обозначив
![]() ,
,
![]() ,
а также, имея в виду, что
,
а также, имея в виду, что
![]() и
и
![]() ,
можно записать уравнения системы (3) в
приращениях
,
можно записать уравнения системы (3) в
приращениях
(7) ![]()
Переобозначение
![]() ,
,
![]() ,
,
![]() ,
дает матрично-векторное уравнение (МВУ)
(8)
,
дает матрично-векторное уравнение (МВУ)
(8) ![]() ,
линейной
ДС,
структура и математические свойства
которого определяют свойства самой ДС.
,
линейной
ДС,
структура и математические свойства
которого определяют свойства самой ДС.
Характеристика переменных пространства состояний. В ТАУ все переменные, как характеризующие состояние системы, так и влияющие на ее движение, разделяются на три группы.
Первая группа - входные переменные (входы, входные воздействия). Они делятся на две подгруппы по их отношению к цели управления.
Часть
воздействий являются управляющими:
или для автоматизируемого объекта -
![]() ,
или для САУ -
,
или для САУ -
![]() .
.
Другие
воздействия являются возмущающими
для данной системы (помехой)
-
![]() .
Эти переменные
представляют собой сигналы, извне
влияющие на поведение исследуемой
динамической системы (объекта или САУ).
.
Эти переменные
представляют собой сигналы, извне
влияющие на поведение исследуемой
динамической системы (объекта или САУ).
Ко
второй группе переменных относятся
выходные
переменные (выходы).
Они обычно обозначаются
![]() и характеризуют наблюдаемую при работе
реакцию
системы на входные воздействия. Выходные
переменные всегда представлены реальными
физическими величинами,
отражающими ход технологического
процесса управляемой технической
системы и, по определению, являются
выходами
и ОУ
и САУ
одновременно. Но они позволяют оценить
лишь некоторые
свойства и
аспекты поведения системы, представляющие
интерес для технолога
процесса,
но не отражают полностью ни текущее
состояние
ОУ, ни динамику
его изменения.
и характеризуют наблюдаемую при работе
реакцию
системы на входные воздействия. Выходные
переменные всегда представлены реальными
физическими величинами,
отражающими ход технологического
процесса управляемой технической
системы и, по определению, являются
выходами
и ОУ
и САУ
одновременно. Но они позволяют оценить
лишь некоторые
свойства и
аспекты поведения системы, представляющие
интерес для технолога
процесса,
но не отражают полностью ни текущее
состояние
ОУ, ни динамику
его изменения.
Третью
группу образуют переменные
состояния
(координаты в пространстве
состояний).
Эти переменные принято обозначать
![]() .
Они образуются совокупностью некоторого
количества
.
Они образуются совокупностью некоторого
количества
![]() переменных,
необходимого
и достаточного
для того, чтобы полностью описать
поведение во времени исследуемой системы
относительно текущего состояния при
известных входных воздействиях.
переменных,
необходимого
и достаточного
для того, чтобы полностью описать
поведение во времени исследуемой системы
относительно текущего состояния при
известных входных воздействиях.
(В
рассмотренном примере процедура
построения ММ
приводит к выделению переменных трех
указанных групп.
Естественной
выходной переменной является координата
центра тяжести груза
.
Она же - одна из переменных состояния.
В состав ПС
пришлось включить вторую -
![]() ,
поскольку только 2 ПС
могут однозначно описать состояние ОУ
2 порядка. Входные
воздействия
представлены
,
поскольку только 2 ПС
могут однозначно описать состояние ОУ
2 порядка. Входные
воздействия
представлены
![]() ,
которая в зависимости от технологии ОУ
м.б. как управлением, так и возмущением.
Их могло быть больше: в условия примера
можно ввести перемещение емкости,
изменение уровня и плотности последней
и т.п.)
,
которая в зависимости от технологии ОУ
м.б. как управлением, так и возмущением.
Их могло быть больше: в условия примера
можно ввести перемещение емкости,
изменение уровня и плотности последней
и т.п.)
Рис.
2. Условная схема формирования ПС
и выходов
ДС общем случае ДС
может быть схематически изображена в
виде т.н. «черного ящика» с некоторым
числом
общем случае ДС
может быть схематически изображена в
виде т.н. «черного ящика» с некоторым
числом
![]() и
и
![]() входных и выходных каналов, как это
показано на рис. 2.
Входные каналы на этом рисунке представляют
собой совокупность входных переменных
или входных воздействий
,
выходные каналы - совокупность выходных
переменных или выходных координат
системы. Промежуточные переменные или
координаты состояния
,
в общем случае, могут быть отнесены к
содержимому «черного ящика» и, таким
образом, скрыты от наблюдателя. В
рассмотренном выше примере это относится
к переменной
входных и выходных каналов, как это
показано на рис. 2.
Входные каналы на этом рисунке представляют
собой совокупность входных переменных
или входных воздействий
,
выходные каналы - совокупность выходных
переменных или выходных координат
системы. Промежуточные переменные или
координаты состояния
,
в общем случае, могут быть отнесены к
содержимому «черного ящика» и, таким
образом, скрыты от наблюдателя. В
рассмотренном выше примере это относится
к переменной
![]() ,
не наблюдаемой в качестве выходной.
Величины
,
и
для ДС
являются функциями времени, т.е.
,
не наблюдаемой в качестве выходной.
Величины
,
и
для ДС
являются функциями времени, т.е.
![]() ,
,
![]() и
и
![]() .
.
Для удобства совокупности входных, выходных и вспомогательных переменных представляются в виде векторов входа, выхода и состояния динамической системы
(9)  ;
;
 ;
;
 .
.
(В
примере переменные
![]() и
и
![]() являются скалярами, но это лишь частные
случаи векторов для
являются скалярами, но это лишь частные
случаи векторов для
![]() ).
).
Рис. 3 Пространство
состояний колебаний груза![]() ,
образует пространство
состояний системы. В
примере оно м.б. представлено плоскостью
с координатами
и
(
,
образует пространство
состояний системы. В
примере оно м.б. представлено плоскостью
с координатами
и
(![]() и
и
![]() ).
).
(Обычным результатом аналитического построения ММ являются ДУ. Они - наиболее универсальный инструмент описания динамики, т.к. ориентированы на неявный способ задания решений. ДУ можно получать в виде уравнений высокого порядка, составленных относительно выходных переменных, и названных «вход-выходной» формой представления, так и в форме Коши. Далее рассматриваются ДУ, представленные именно этой формой).
Формы представления ММ линейных ДС. Уравнение состояния. Анализ структуры (8) показывает, что такая форма ММ задает явно связь интенсивности изменения ПС с их текущими значениями и входными воздействиями. При этом ПС задаются неявно - как решения ДУ состояния для конкретных условий движения ДС.
В ТАУ ОУ и САУ подвержены воздействиям двух групп: управляющим и возмущающим. Поэтому
(10) ![]()
В
(8 и 10)
![]() называется системной
матрицей: ее структура и значения
элементов определяют фундаментальные
свойства описываемой уравнением ДС.
называется системной
матрицей: ее структура и значения
элементов определяют фундаментальные
свойства описываемой уравнением ДС.
Во-первых,
![]() - квадратная
- квадратная
![]() матрица,
матрица,
![]() - порядок ДУ
- порядок ДС.
- порядок ДУ
- порядок ДС.
Во-вторых, она, как бы распределяет влияние координат состояния на закон движения системы, поскольку ее нулевые элементы исключают некоторые переменные состояния из соответствующих уравнений.
В-третьих, от знаков и значений элементов зависят фундаментальные свойства ДС, как устойчивость, управляемость, наблюдаемость и др.
Матрица
![]() в (8) называется матрицей входов.
Ее роль в ДУ
– распределение входных воздействий
между строками системы. В уравнении
формы (10)
уже называется матрицей управляющих
входов
или матрицей управления.
Тогда
в (8) называется матрицей входов.
Ее роль в ДУ
– распределение входных воздействий
между строками системы. В уравнении
формы (10)
уже называется матрицей управляющих
входов
или матрицей управления.
Тогда
![]() является в (10) матрицей возмущающих
входов
или матрицей возмущения.
является в (10) матрицей возмущающих
входов
или матрицей возмущения.
(Использование
записи (10) особенно удобно для ОУ.
При замыкании его ММ уравнением УУ
переменная
из (10) исключается, а член
![]() остается, задавая структуру и характеристики
воздействия возмущений на систему
управления через ОУ. Использование в
таких задачах уравнения (8) менее наглядно
и все равно приводит к необходимости
декомпозиции входов.Ъ
остается, задавая структуру и характеристики
воздействия возмущений на систему
управления через ОУ. Использование в
таких задачах уравнения (8) менее наглядно
и все равно приводит к необходимости
декомпозиции входов.Ъ
Формы представления ММ линейных ДС. Уравнение наблюдения. Однако уравнение состояния как ММ является неполной характеристикой ДС, так как переменные
 чаще всего бывают «скрытыми», т.е.
ненаблюдаемыми, а, в ряде случаев, и
вовсе абстрактными, т.е. не имеющими
реального физического содержания. Но
САУ нужна
для целевой направленности работы
реального объекта. Его технологическое
состояние
характеризуется реальными физическими
переменными - выходными.
Поэтому ее ММ
должна быть дополнена выражениями,
связывающими ее состояние
с выходными
переменными.
чаще всего бывают «скрытыми», т.е.
ненаблюдаемыми, а, в ряде случаев, и
вовсе абстрактными, т.е. не имеющими
реального физического содержания. Но
САУ нужна
для целевой направленности работы
реального объекта. Его технологическое
состояние
характеризуется реальными физическими
переменными - выходными.
Поэтому ее ММ
должна быть дополнена выражениями,
связывающими ее состояние
с выходными
переменными.
ПС,
как и пространство решений ДУ
состояния
![]() -мерно,
совокупность ПС
и входов полностью определяет состояние
ДС.
(Любая
другая переменная системы однозначно
задается этой совокупностью).
Поэтому вектор выходных переменных
-мерно,
совокупность ПС
и входов полностью определяет состояние
ДС.
(Любая
другая переменная системы однозначно
задается этой совокупностью).
Поэтому вектор выходных переменных
![]() в любой момент времени
в любой момент времени
![]() является функцией
является функцией
![]() и
и
![]() .
Таким образом, уравнение состояния в
полной ММ ДС
должно быть дополнено алгебраическим
уравнением следующего общего вида:
.
Таким образом, уравнение состояния в
полной ММ ДС
должно быть дополнено алгебраическим
уравнением следующего общего вида:
(11) ![]()
![]() ,
которое принято называть уравнением
наблюдения.
,
которое принято называть уравнением
наблюдения.
(Для
рассмотренного примера это уравнение
имеет вид простого равенства (в
приращениях) -
![]() ).
).
Общая
форма записи уравнений состояния –
векторная. ДС
может иметь не только несколько ПС,
но и несколько выходов. Полученное для
примера уравнение наблюдения должно
быть записано в следующем виде:
(12) ![]() ,
,
![]() ,
где
,
где
![]() будет называться матрицей наблюдения
по состоянию.
будет называться матрицей наблюдения
по состоянию.
(Запись
(12) уравнения состояния не является
формальностью. Пусть в качестве выходной
переменной в исследуемой механической
системе рассматривается не положение
груза, а сила жидкостного трения,
испытываемой грузом (исследование
эффектов вибраций). Тогда
![]() и матрица наблюдения по состоянию
определится выражением
и матрица наблюдения по состоянию
определится выражением
![]() ).
).
Форма
(12) не универсальна. Если выходом является
растяжка пружины, т.е.
![]() ,
то матрица наблюдения
по состоянию
,
то матрица наблюдения
по состоянию
![]() задастся выражением
задастся выражением
![]() ,
но второй компонент наблюдения в
матричном уравнении
,
но второй компонент наблюдения в
матричном уравнении
![]() отражен не будет. Значит, нужна другая
форма матричного уравнения наблюдения:
(13)
отражен не будет. Значит, нужна другая
форма матричного уравнения наблюдения:
(13)
![]()
Такая
форма дает возможность записать новое
уравнение наблюдения, дополнив матрицу
матрицей
![]() ,
назвав ее матрицей наблюдения
по управлению.
В практике ТАУ
бывают случаи, когда на наблюдение
влияют возмущения. Тогда матричное
уравнение наблюдения должно иметь
наиболее полный по форме вид
(14)
,
назвав ее матрицей наблюдения
по управлению.
В практике ТАУ
бывают случаи, когда на наблюдение
влияют возмущения. Тогда матричное
уравнение наблюдения должно иметь
наиболее полный по форме вид
(14) ![]() ,
где
,
где
![]() естественно назвать матрицей наблюдения
по возмущению.
естественно назвать матрицей наблюдения
по возмущению.
Формы представления ММ линейных ДС. Полное уравнение ДС. Таким образом, полной ММ ДС в пространстве состояний является пара векторных уравнений состояния (10) и наблюдения (14)
(15) ![]()
Таким образом, метод пространства состояний базируется на возможности и достаточности описания поведения многих ДС некоторым количеством дифференциальных уравнений первого порядка в полных производных. Переменные, производные которых формируют левые части этих уравнений, называются в теории управления переменными состояния. Уравнения (15) называются матрично-векторными (МВ) ДУ.
Этот подход лежит в основе т.н. современной теории управления.